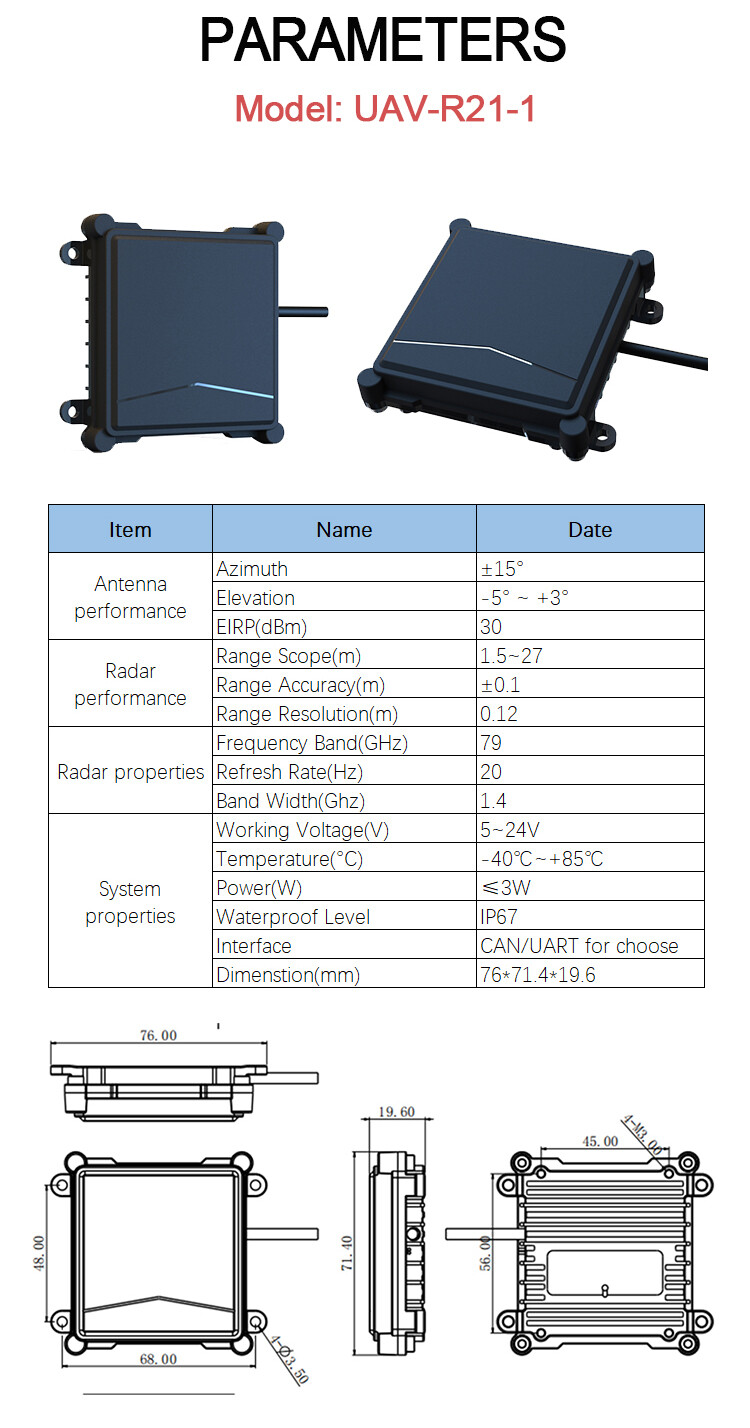
I am a manufacturer of rangefinder equipment. I have two good rangefinders UAV-H31 and UAV-R21. UAV-H31 used to follow terrain and UAV-R21 used to avoid obstacles.
This is a brief introduction to the rangefinder.
We have completed the use of UART to communicate with Ardupilot. And it works well.The following is a document on how to use the rangefinder by UART.
UAV-R21-1 UART connect with Ardupilot.pdf (924.6 KB)
Connect the UAV-H31-1 with Ardupilot.zip (888.8 KB)
H31 video:UAV-H31
R21 video:UAV-R21
We are working on the completion of communicating with Ardupilot using the CAN interface.
If you can help me with the CAN interface, you can contact me.
If you are interested in this rangefinder, you can also contact me, send me a message