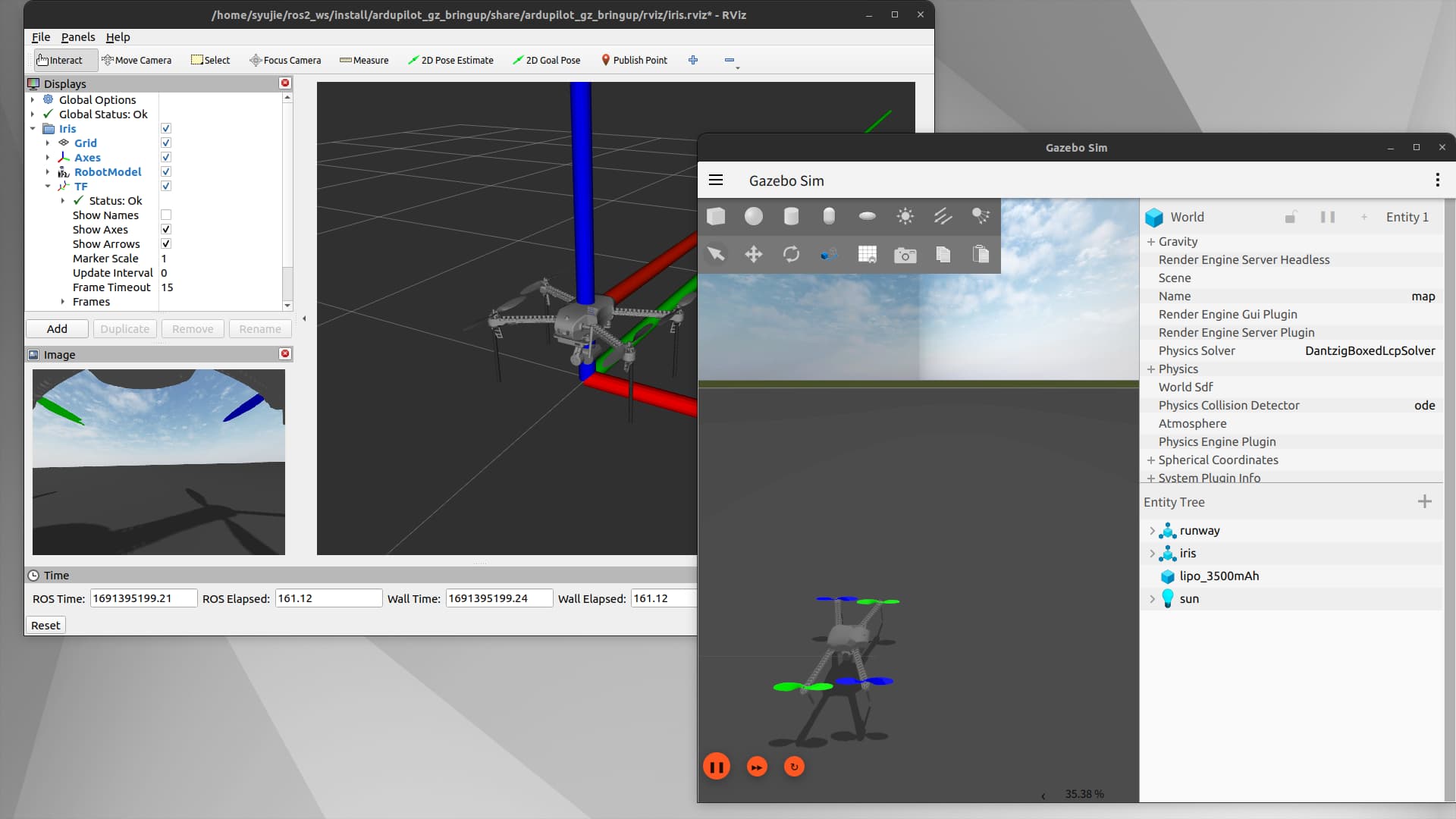
Based on this guide, I completed creating SITL in a gazebo environment, and my computer now displays the simulation perfectly.
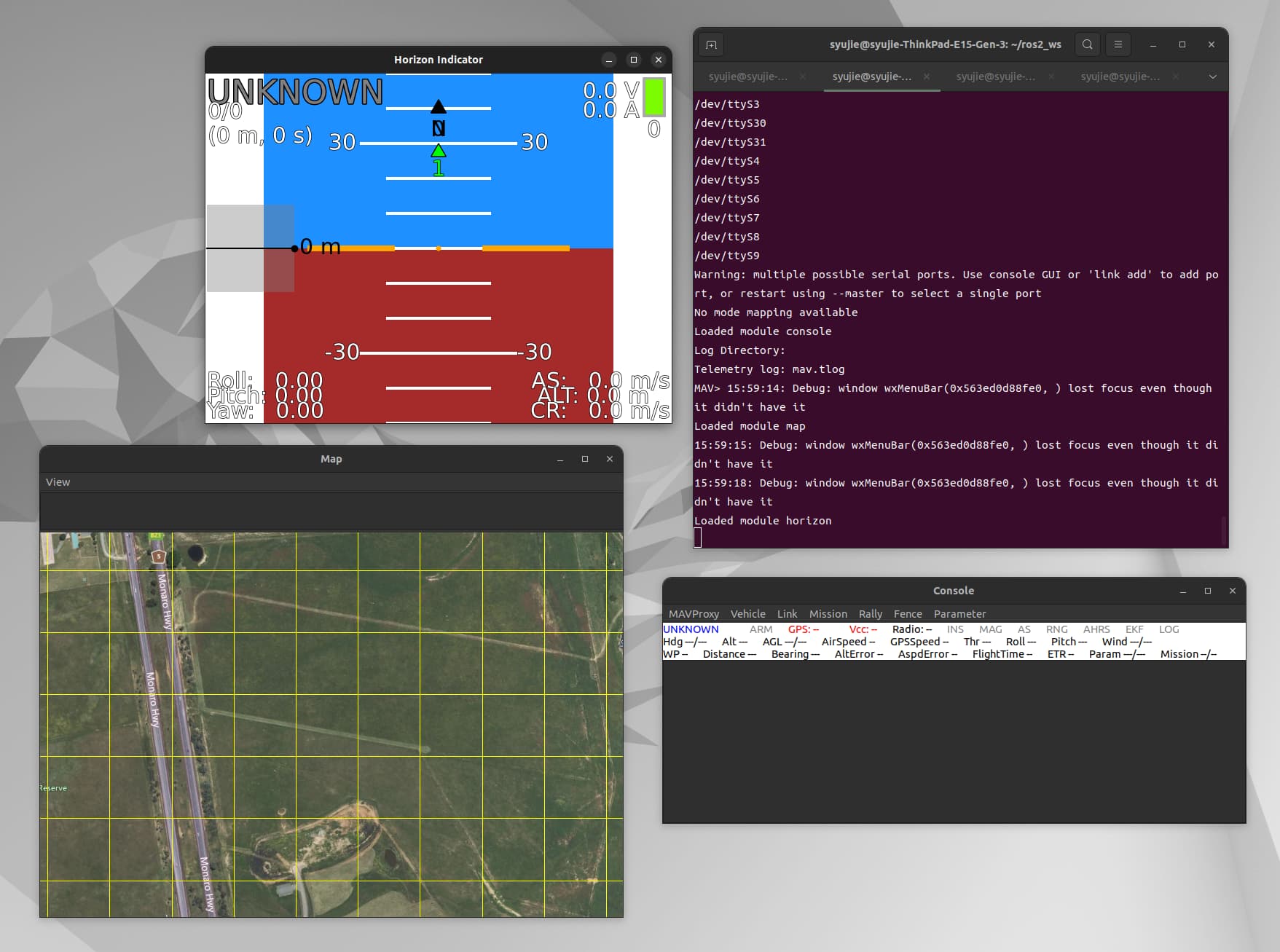
I’d like to be able to use dronekit or mavsdk for courier recognition airdrops, but I’m not sure how to get opencv to get the footage from the camera in gazebo; on the other hand, I discovered that I can’t connect to the simulation environment using mavproxy.
Hi @ultramarine1939, it looks like you’ve used the ROS 2 / Ardupilot project to set up your Gazebo simulation. The wiki guide Using SITL with Gazebo — Dev documentation describes how to set up a simpler environment that does not require ROS 2.
if your vehicle model is equipped with a camera sensor then you can acquire the image from the gz-transport layer. The ros_gz bridge does exactly this when mapping data through to ROS 2. If you want to process it using alternative means then that project may help guide how to subscribe to the necessary topics and convert to other formats.