I’m working on object avoidance according to Object Avoidance with Dijkstra’s
I’m using Copter, set the param
-
- OA_TYPE = 2
-
- OA_MARGIN_MAX = 10
-
- FENCE_ENABLE = 1
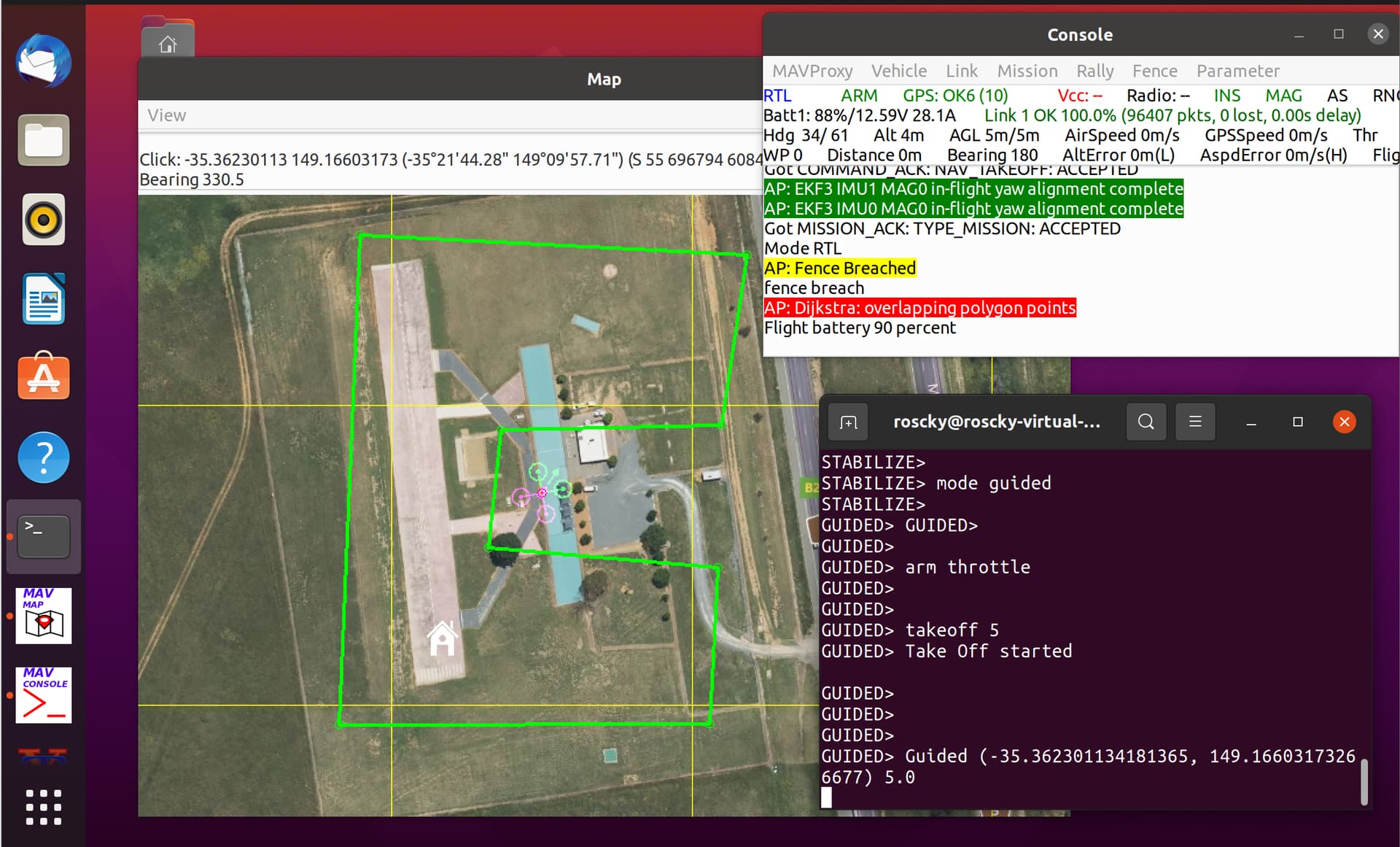
Then I draw the fence in the map like the video shows(using Fence->Draw in map). But when I trying to fly(using Fly To in map), the copter just fly through the fence. And the console reports AP: Dijkstra: overlapping polygon points
It’s maybe a very dumb question, but it confuse me for quite a long time, I’m unfamiliar with the basic operation with SITL,
Any suggestions is highly appreciated.
Thanks!!!