Hi! I’m making my way through the methodic configurator/tuning process and wanted to make sure I am understanding something about MOT_HOVER_LEARN:
After doing a short flight where I just try to hover and basically stay still in STAB mode (with MOTOR_HOVER_LEARN set to 2), when I go check the MOT_THST_HOVER value it is 0.2. I hope this means I successfully saved this value, since it’s not the default.
But in subsequent flights, when I engage ALT HOLD, the copter goes straight up. My guess is that the hover throttle is actually lower than 0.2 but since 0.2 is listed as the minimum value that the LEARN process will output, I’ll need trial and error to get to a true value where ALT HOLD will work reliably. Am I right here?
Can I just leave MOTOR_HOVER_LEARN on 2 all the time, or will it constantly be setting my MOT_THST_HOVER value (up to) 0.2 all the time, even if I’ve set it at a level below that that works for me, say, 0.125?
I think ALT_HOLD not working (ie, copter going straight up) also means that LOITER will not behave properly - is that correct?
Thanks to everyone for their quick help on here. It’s a slow process to tune one of these for the first time but I’m learning a lot!
AKA
(sorry, an additional question I had forgotten to ask - is there a long-term downside to setting the hover throttle too low? Presumably the copter will realize it’s descending and add throttle to truly hover?)
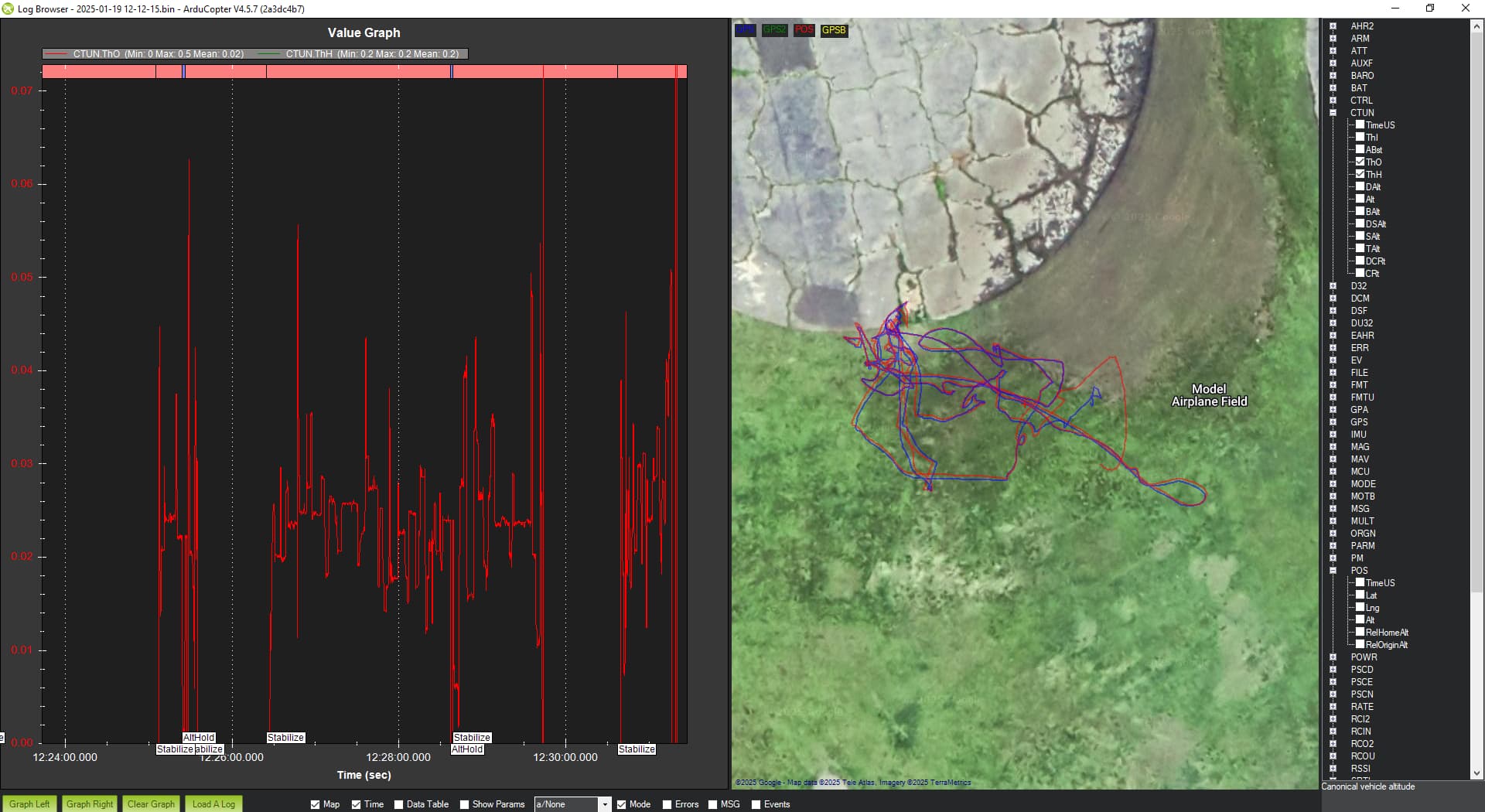
Review the log of that hover flight and graph CTUN>ThO (scaled throttle output) & ThH (calculated hover throttle) They should be close or converge if it’s learning. In fact this is a good way to set the hover throttle value.
Thanks for the quick responses - I am in a little bit of a catch-22, since it is impossible for me to engage ALT HOLD for 30-40 seconds - ALT HOLD causes my copter to immediately shoot upwards at high speed.
I am trying to follow the MC but I am finding it very complex (definitely a me problem, no offense intended!).
So I guess I have never successfully set MOT_THST_HOVER as a result of me never being in ALT HOLD for more than a few seconds?
Thanks again for the quick replies, and you’re right, the MC is not complex - the process itself is (for me, a first-timer). I live far away from where I can fly so when I can make it out to the field, it’s hard to progress very far before I come up against an issue/behavior I don’t understand. I figured out how to get my cellphone to be a wifi hot spot, so my next trip out I should be able to be more efficient in the test-evaluate-tune-test loop.
I had thought 0.35 was the default based on the params screen (screenshot attached), but I must be mistaken - good to know, thank you! I am unable to set the hover throttle under 0.2 by hand, so I will keep reading to figure out what I should try next.
I’m attaching a screenshot of one of my last logs, where I was able to manually maintain constant altitude (more or less) - I may be reading the graph incorrectly but it implies 0.022-0.024 is my hover throttle (which admittedly does not make much sense to me) - but CTUN.THO has a mean value of 0.02. I will read up on what the “scaled” part of scaled throttle value means.
Sorry again for such basic questions. Thank you for the patient help to date!
Use Daves method of setting the hover thrust from reading the value from within a log, but also you may have to set MOTOR_HOVER_LEARN,0 so it doesnt change. Experiment with that to see what suits your copter.
Sorry for the delay in my reply - I am making progress but weather has made it difficult to get time out in a place where I can fly.
I think the Methodic Configurator is very well-designed, and the complexities (for me) arise in the number of side-quests and digressions I find myself needing to complete before I can move on to the next step in the MC. So, it’s no fault of the MC’s, I just as a first-timer have sometimes lost my place or misunderstood when I was ready to proceed to the next MC step.
Two examples; the first is, I’m unable after trying many different approaches to get any ESC configuration to happen - I’m using a SpeedyBee 50A 4-in-1 ESC that has BLHeli_S J-H-40 firmware. But the online ESC-configuration tool never connects over serial passthrough to my ESC, and I’ve been unable to get other downloadable software to talk to the ESC either (likely also because all the serial passthrough seems to need Betaflight and not Ardupilot installed). So even though it doesn’t feel great, I am skipping that step in the MC. I guess I can’t tell from how step 6.4 is written how critical it is to alter the default BLHeli_S J-H-40 firmware I’m using, or how to tell if the bidirectional d-shot info is already set up? (I selected DShot600 in the Ardupilot Config menu and it’s been working fine as far as I can tell?)
The second example is setting up Yaapu telemetry on my Radiomaster TX12, which took me three hours - documentation for the process for the TX12 is not all in one place or nearly as easy-to-read as the MC
All this to say, I can’t think of any big improvements to the MC that don’t involve absorbing big chunks of other setup/config processes. Thanks again for making the MC, it’s essential!