I have done some thinking-out-of-the-box experiment today and have some findings maybe of interest.
I did the following:
- Changed TURN_RADIUS to 0 from 1, which was what I previously had. The skid steer turning is much tighter under ACRO mode.
- Changed ATC_STR_ACC_MAX to 0 – removing the limit. Per @rmackay9 post here Rover: ensure ATC_* and PIVOT* params don't cause overshoot during pivot turns · Issue #8788 · ArduPilot/ardupilot · GitHub, it appears that I need higher ATC_STR_ACC_MAX to prevent my rover to overshoot, even though this is counter intuitive, as I had tried but with less success with lower ATC_STR_ACC_MAX values say at below 90.
- Changed MOT_STR_THR_MIX to 1 – prioritize steering over speed, also per Randy’s post here: Pidachieved opposite to piddesired? - #14 by rmackay9
- Changed MOT_SLEWRATE to 50 – reducing current drawn at acceleration as per some discussions on this board.
- Increased STR_RAT_MAX to 90, despite gz saying only ~25 degree/second. From my data logs, it appears my rover often overshoots to ~100 degrees/second.
- Played with different ATC_STR_RAT_FF values and set P and I to ~20% per Randy’s post here How to solve ROVER meandering? - #6 by rmackay9
It appears that my rover performed a bit better at turns now, steering more confidently compared with what I had before, even though as of now, my rover still doesn’t make perfect turns and not following straight line.
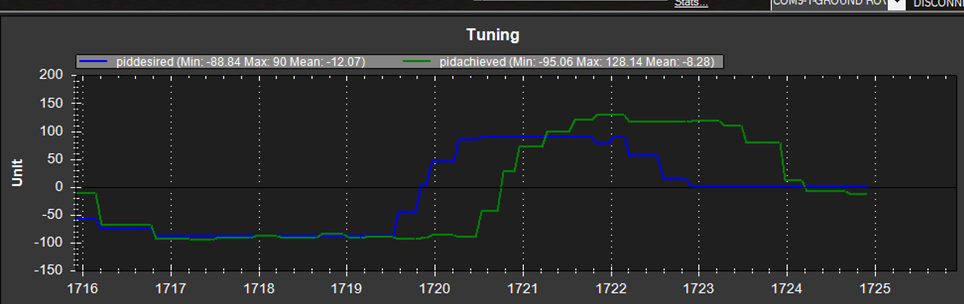
I have tried going back to the basic, starting from default parameters and then tune the speed controller before the tuning the turn rate, but I still wasn’t able to figure out how to compensate my rover’s phase shift issue when it comes to tuning the steering as shown below, confirmed by my dataflash logs. The (steering) pidachieved is about 1 second lagged compared with the piddesired. Some website suggested feedforward controller could accommodate this type of phase shift; but I don’t know enough the working of Ardurover to guestimate the mysterious ATC_STR_RAT_FF value.

I wonder if board members have experienced this kind of delay in response issues, and how you might have solved this. (My rear wheel drive, skid-steer rover is driven by ESC directly connected to the flight control. So I shouldn’t have issue with mechanical lags for example due to servo linkage.) Any advice will be appreciated.