Txs for the logs. In general the vehicle looks pretty well tuned but I noticed a few things (not all necessarily problems, just observations):
- ARMING_CHECK = 0 <-- I wonder why this is required
- RC3_DZ = 0 <-- this means the vehicle will always be commanding a speed forward or backwards. I think this should be set to at least 10
- RC3_MIN = 1493 <-- I guess the vehicle can’t move backwards?
- MOT_THR_MIN,0 <-- it might be good to set this to take into account the motor deadzone (wiki). If possible use MP’s motor test screen to test the motors in reverse as well as forward.
- NAVL1_PERIOD = 2 <-- I’m surprised at how low this value is. I’ve almost never seen values under 8 well although it seems to be driving missions OK although the desired turn-rate (from the navigation) is a bit noisy.
- MOT_STR_THR_MIX = 0.5 (the default) <-- I’ve found on some skid steering rovers it helps to increase the priority of steering over speed. So increasing this to 0.8 or even 1 will make the vehicle slow down if it needs to in order to turn at the desired rate.
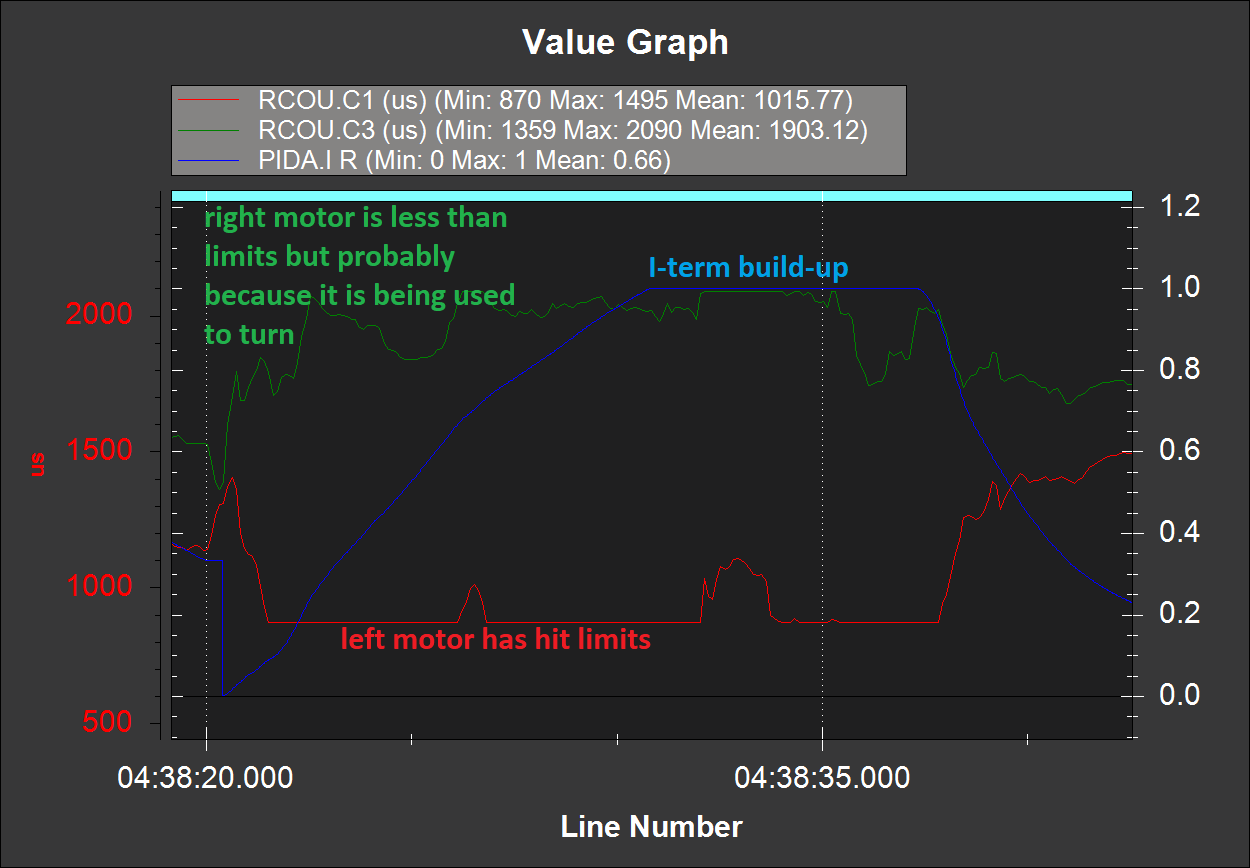
EDIT, I think we might have a code problem related to limiting I-term build-up when the motors are saturated. This is a graph of the motor outputs and throttle/speed controller’s I-term. The vehicle cannot reached the target speed of about 1.5m/s because (I think) the motor are fully saturated trying to achieve the speed and turn rate… so we shouldn’t be building up I-term. I’ll add this to the list to be investigated