I have to amend the initial info, that AM32 ESC Config Tool does not connect through Ardupilot/Betaflight Passthrough. It appears to be a programming issue in the AM32 ESC Config Tool.
I was just experimenting with the Holybro ESCs, one flashed with AM32 and another one left on BLHeli32. BLHeli32Suite connects directly without additional quirks. The AM32 ESC Config Tool seems to miss the first attempt and replies “No Response from ESC”. Ignoring the error and hitting M1 again actually makes it connect and readout the options.
So I’m fine with my setup now. Thanks for help.
How to choose where the rpm comes from?
Im getting a bit frustrated with my Tekko AM32 ESC. It seems to frequently power up and decide to not output telemetey on the serial wire. Also I thought I was getting RPM from the dshot but when I pull off the serial wire, no ESC data at all.
I need a reliable RPM for the notch. Will the notch filter find the RPM from the serial or it needs to be from dshot?
Just updated to 2.16 and still the same.
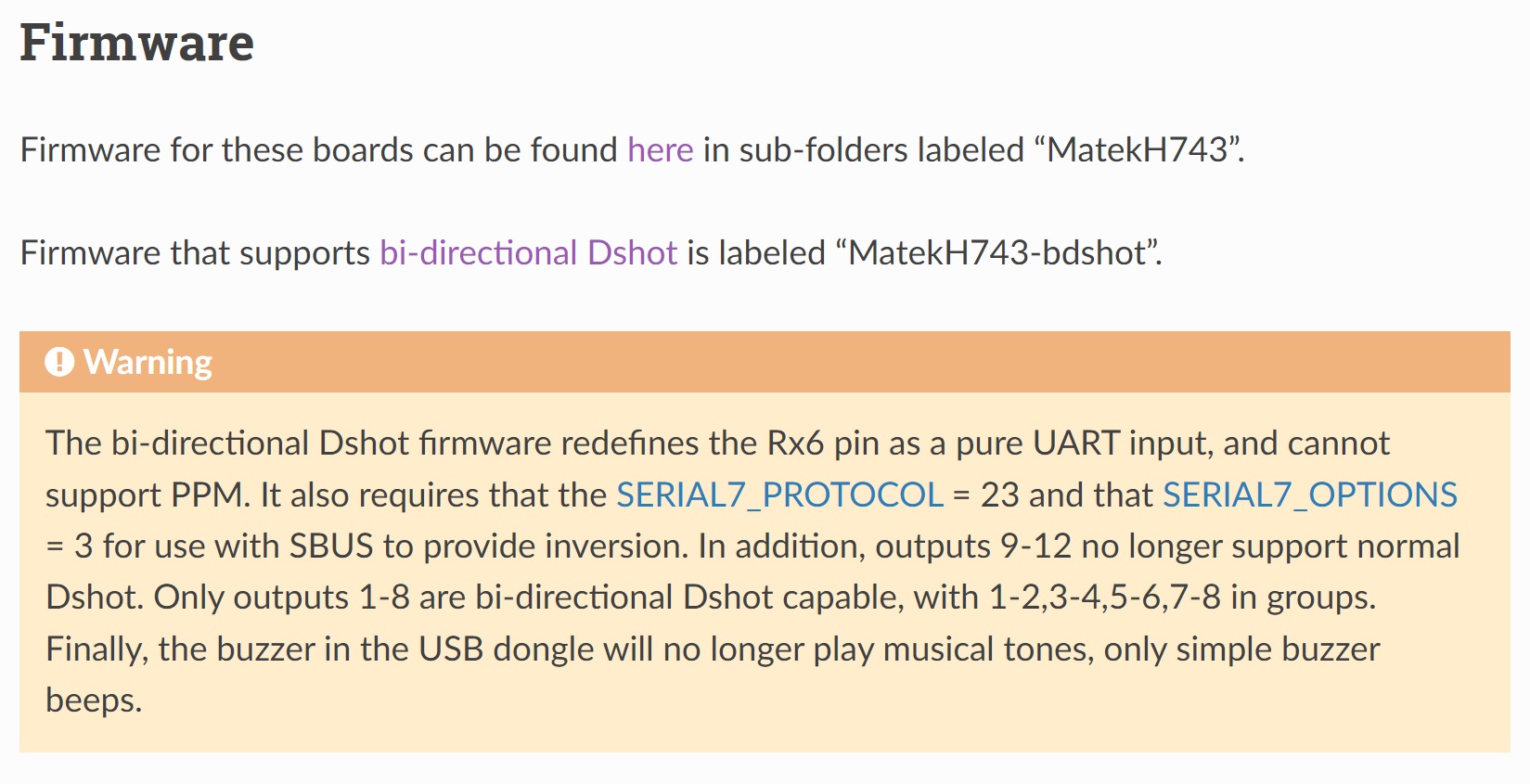
You are using Bdshot firmware on the FC and configured for Bdshot?
Yes.
I think I just discovered part of the problem. I noticed I nearly always got ESC telemetry if I first powered up by USB, then later plugged battery to power the ESC. I thought the AM32 may be slow to boot so put a BRD boot delay to 5s and so far - so good.
Anyway that still dosent explain why I get no rpm with serial wire pulled off. Im on BDShot 600
I have yet to try an AM32 ESC but let’s take s look at your parameter file anyway.
I just posted this on the main page. Something limiting my motor output PWM.
Id also appreciate if you can find any glaring problems in my first setup, especially around the notch filters.
Thanks.
Its the VTOL hover test file.
Let’s try this:
Q_M_PWM_TYPE,6
SERVO_BLH_AUTO,1 (which you already have)
SERVO_BLH_BDMASK,448 (which you already have)
SERVO_BLH_MASK,0
SERVO_BLH_OTYPE,0
SERVO_DSHOT_ESC,1 (try extended after getting this to work)
SERIAL4_PROTOCOL,2 (to disable serial telemetry for testing)
make a flight and see if ESC RPM is present.
1 Like
Just tried those settings. Not a flight but armed while checking RPM. Still no RPM showing.
Yea, I believe you are right.
That seems to be it. Got BDShot working except no RPM from servo5 (Right motor A). Cant see why that one is not working. It does get RPM when serial ESC telemetry enabled.
Im not sure which over-rides which? Which one is shown in status and for notch filter if both are available to the FC?
New settings (The BDshot file)
https://www.dropbox.com/scl/fo/ilmeilnkvkq2a0n7kqkm9/h?rlkey=3dg8ixyk1fowv6o6mrjou781u&st=1obsgl1d&dl=0
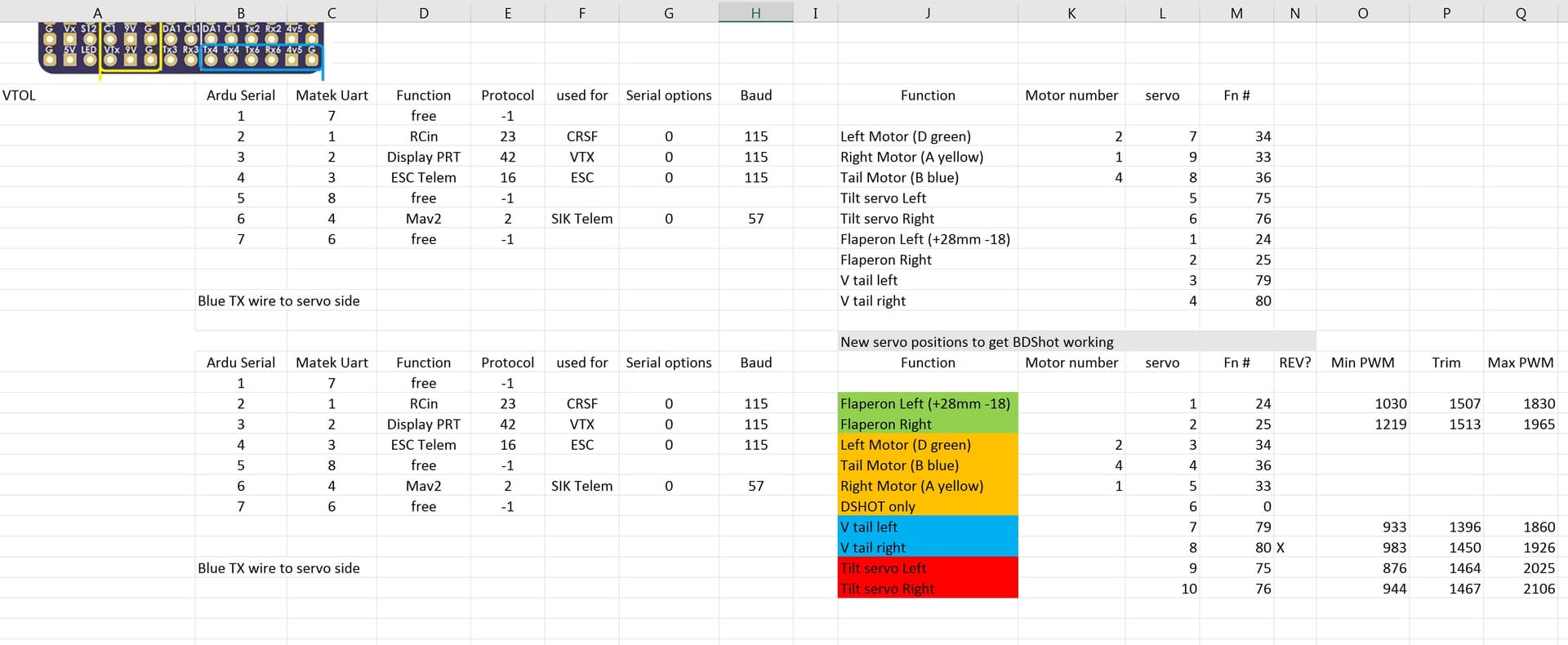
I find it really useful to keep a spreadsheet.
One important thing to note for those struggling to get AM32 serial telemetry - I seem to have fixed that problem by putting a BRD_BOOT_DELAY to 5s. I guess the AM32 takes longer to boot than the H743.
@andyp1per can answer that but from what I recall from previous posts regarding this it will use Bdshot if available.
There is no overriding, both will post to the same motor slot in the ESC library at the same time.
Some strange behavior -
Yesterday I hover tested my 3 motor VTOL with all RPM coming from ESC serial. All 3 were reporting RPMs 4400-4600 in hover. (I believe this is correct from Ecalc)
Today after finally getting BDshot RPM reporting on 2 motors (but not the 3rd), Im getting 1 motor reporting +500 RPM from yesterday with no other change. This makes me suspect that one ESC is reporting from serial while the 2 others are via BDShot, so it follows that perhaps there is an error in one system or the other?
Something else odd, Yesterday I checked the filter review tool and had a spike around 75Hz. Reviewing after today’s flight it now has a spike around 41Hz.
It appears the log ESC number is servo number -1?
The version of AM32 is really important. Are you using the latest? I needed a beta version to get bdshot to work correctly on ardupilot
I put 2.16 on a few days ago. Both tests are with that FW.
Ok I believe that is the latest. @tridge is actively developing AM32 for AP so its worth letting him know about the problems you are seeing.
I have figured out why one motor wouldn’t give esc telemetry. Didnt press write after changing dshot settings. But its still interesting that different rpms were reported from serial and dshot.
They should be the same - same calculation - seems weird
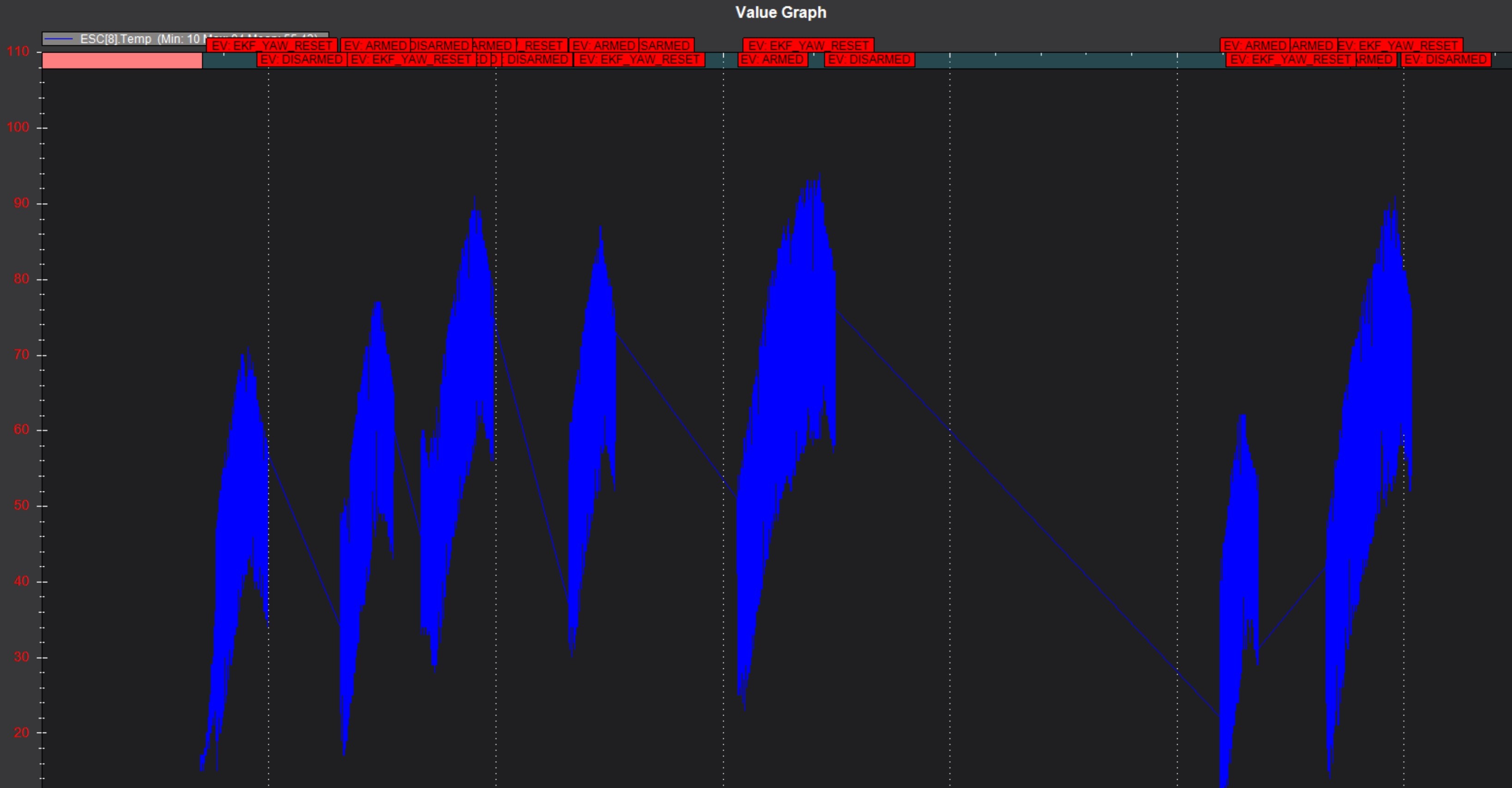
Ill test again tomorrow now all 3 dshot are working. I was surprised to see more than RPM coming over dshot. I am getting temperature, voltage and current but the current is not correct. The temperature seems accurate while motors not running but gets extremely noisy when they are. This info is quite important at the moment as Im struggling to get a vtol working. According to ecalc I should have at least 35% throttle overhead but there is hardly any. Trying different props.
See what temp does then motors running -