ARSPD_PIN is valid for analog sensors, your sensor does not need to modify it.
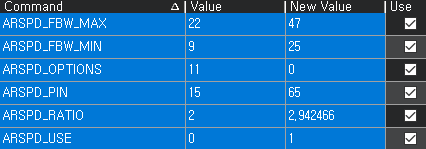
ARSPD_RATIO value is not fixed, it is related to the sensor and installation method.
Set the initial value of ARSPD_RATIO to 2 and set ARSPD_autocal to 1 (turn on automatic calibration). The ARSPD_RATIO value will be automatically updated during flight. For safety reasons, it may be possible to use FBWA or not use the airspeed sensor as the speed source for the first flight.
This is the scaling factor. When the scaling factor is too large, the airspeed value obtained by the aircraft will be greater than the actual value. In the end, the aircraft will fly at a very low speed, which may cause insufficient lift and crash.
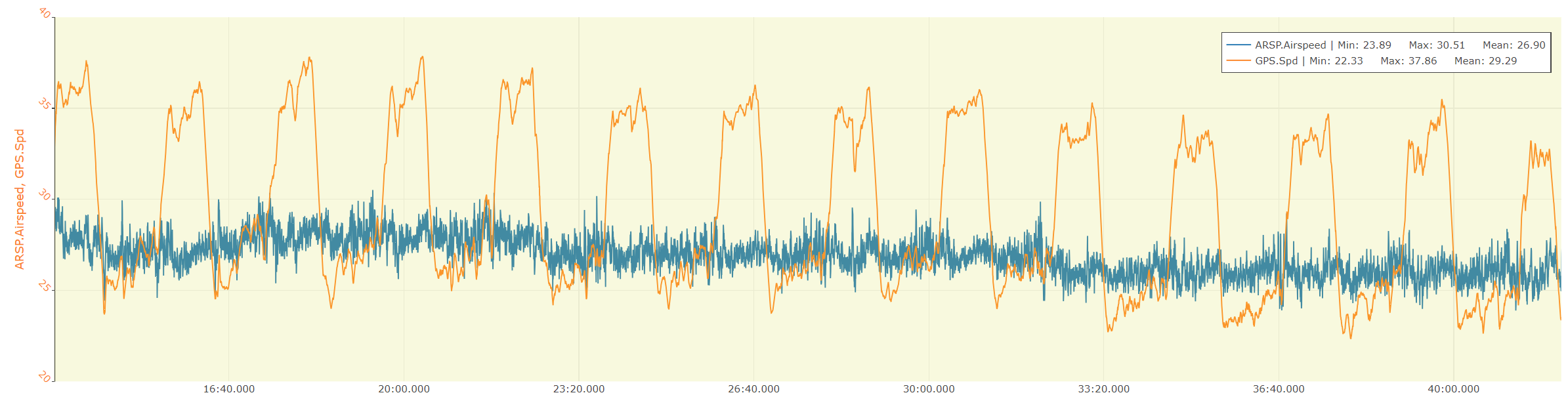
Following this document you can approximate the ARSPD_RATIO from 00000042.BIN. You said that the airspeed readings are overestimated, but they are rather underestimated. TRIM_ARSPD_CM is set at 26.0 m/s, but the aircraft is actually flying at about 29 m/s.