I’m looking to configure an H-RTK (High Precision RTK) as a mobile base station that’s operating through a PC, and I want to use Mission Planner to synchronize the data to automatically set the Home coordinates for my drone.
Could anyone guide me on how to properly set up the H-RTK as a mobile base with Mission Planner so that it continuously updates and sends correction data to the drone, allowing the Home point to be dynamically and accurately set?
I’m particularly interested in the step-by-step process or any specific settings I need to adjust within Mission Planner to ensure the RTK/GPS Inject feature works seamlessly with the mobile H-RTK base station setup.
Thank you in advance for any assistance or pointers you can provide!
Yes, I did see that page, but I’m curious if there are any additional settings needed on the UAV side, or if the RTK base will automatically sync to the UAV, because I plan to do some testing with the PC+RTK base set up on a trolley.
Thank you. I am looking to create a mobile basestation (a truck), where the basestation would be a computer running Mission Planner, with the hardware using a datalink and H-RTK, aiming to have the UAV autonomously land on the truck. Is that possible?
In my mind, the UAV would track and land simultaneously, similar to what is shown in the linked video. I’m looking for a method that doesn’t involve using Lua scripts, but rather a way to set it up in Mission Planner, to achieve this functionality.
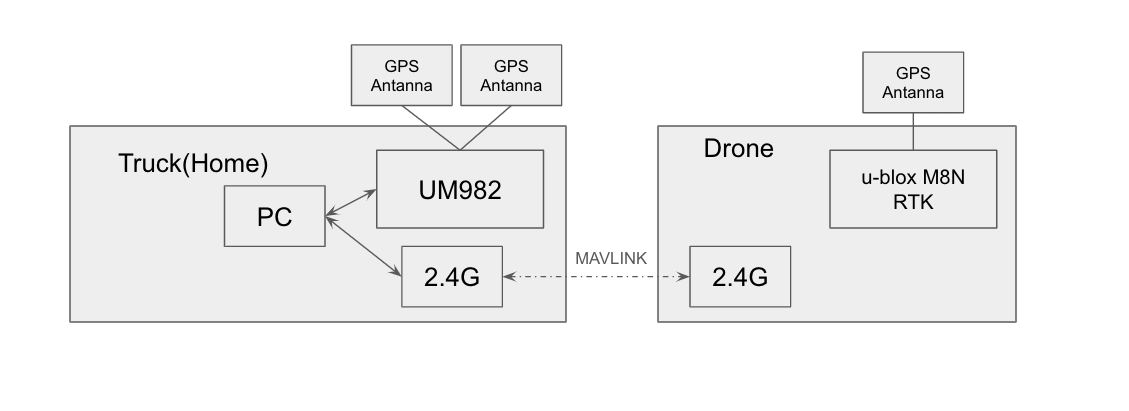
Currently, the RTK base station (the truck) is using the UM982 (dual-antenna) and is connected via USB to the ground station for RTK/GPS Inject, using a datalink to communicate with Mission Planner via mavlink.
The copter is equipped with a Here3 Plus (u-blox M8P with RTK).
There are a total of one base station (the truck) and one copter.
Regarding the mavlink datalink you mentioned that involves three devices, I currently only have two endpoints. Could you clarify the configuration of the three devices you mentioned?
I have sketched a simple diagram of the current setup as follows.