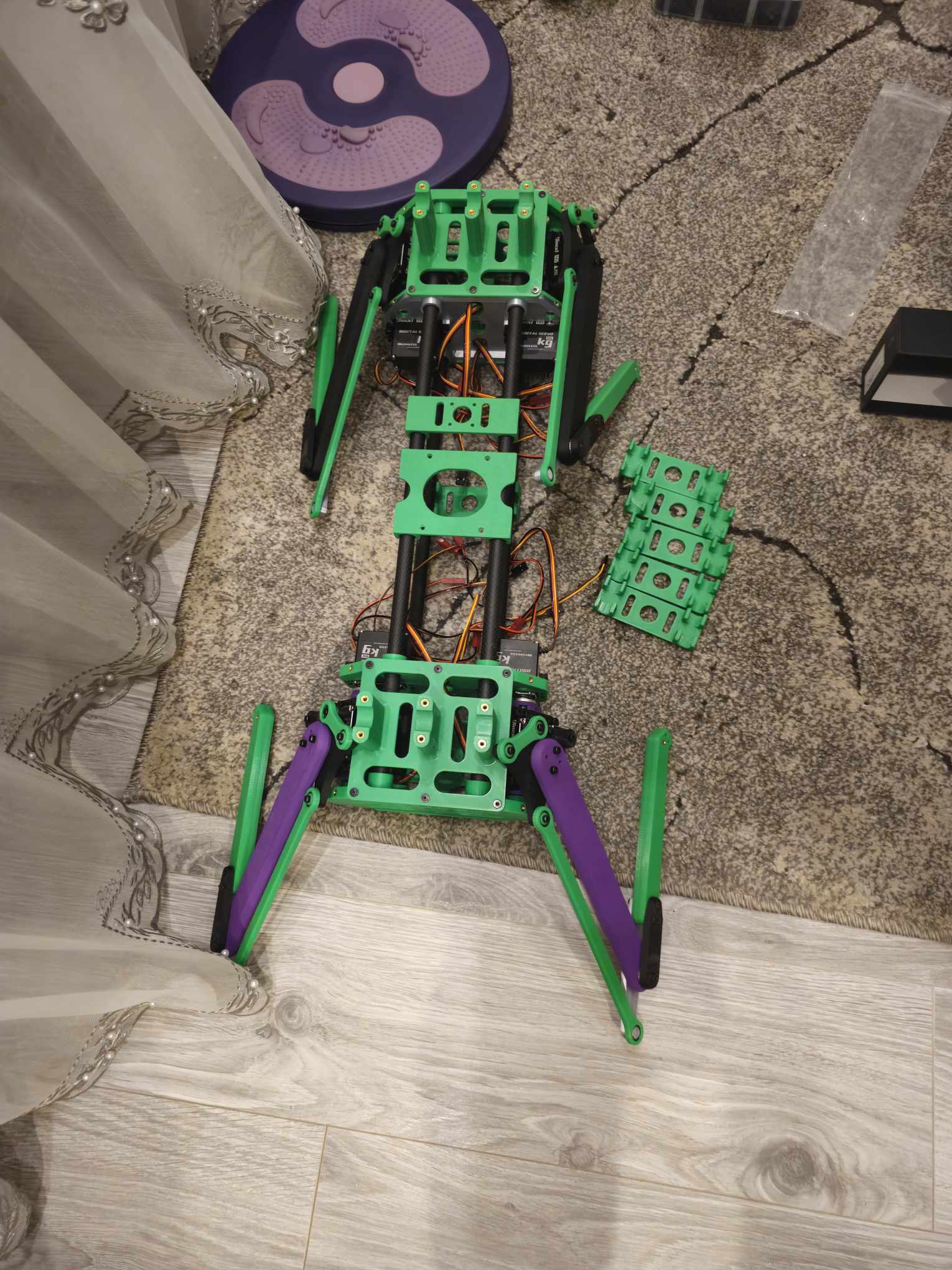
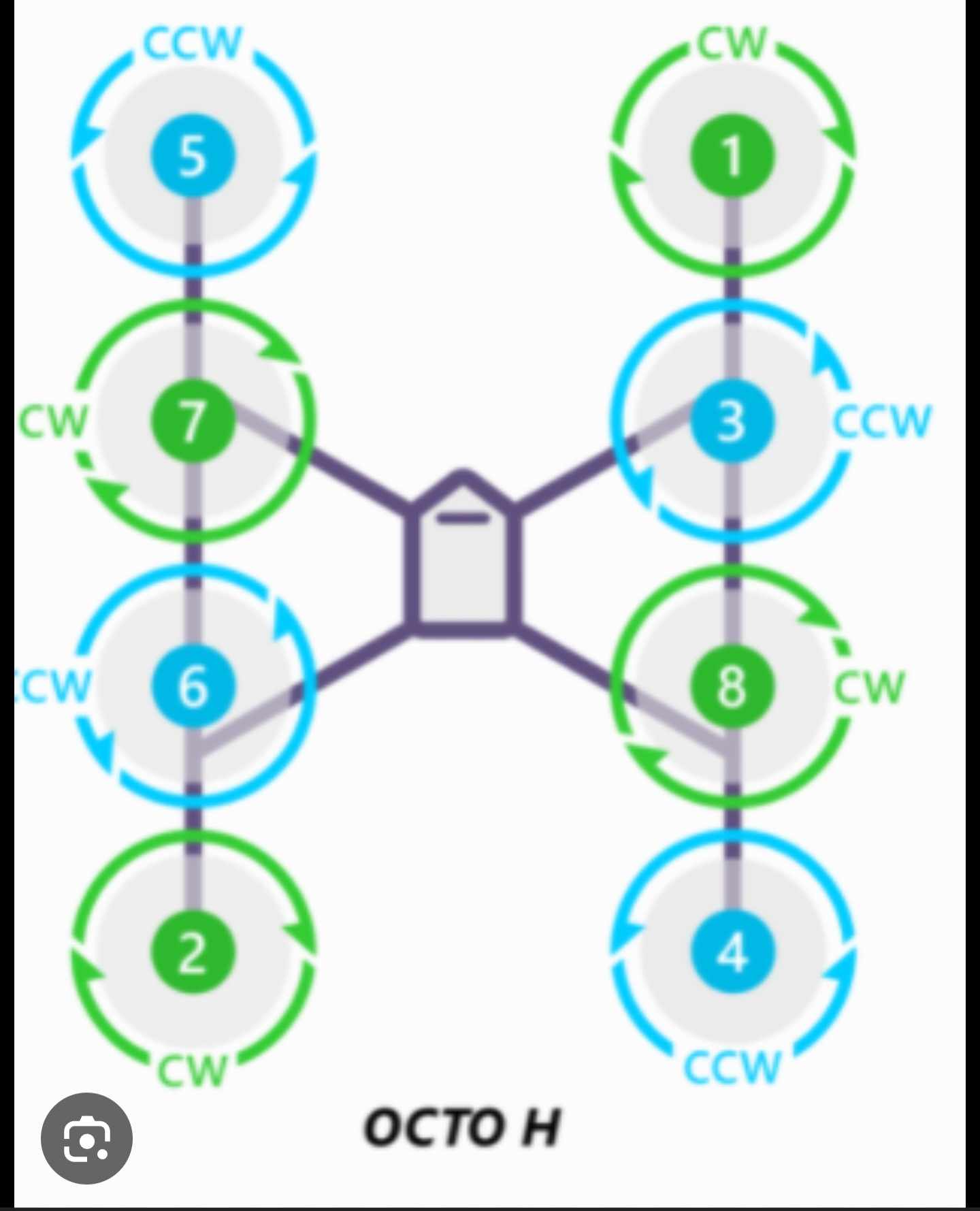
Hi, i am making a flying robo dog project and i wanted to set it as octo-h hovever i coudn`t find anything besides some other posts with positions / vectors of motors mounted in octo h class. If anyone could help me with this one i would be very thankful. For our design, the motors are mounted along two parallel pipes. Each motor is spaced 27 cm apart from the next, with a 60 cm gap between the centers of the two pipes. Additionally, the motors are angled slightly towards the center by 5%, although we’re open to center them directly if necessary for simplicity or performance.
Thank you in advance for your help!