Hi,
I’m think about DIY a Rover which runs latest ArduRover software, and I have very little knowledage about Rover, just started from ArduPilot Rover — Rover documentation
I think it’s simliar to ArduCopter, but right now I’m stucked in ESC/Motor , what type of ESC and motor should I choose, and how to connect?
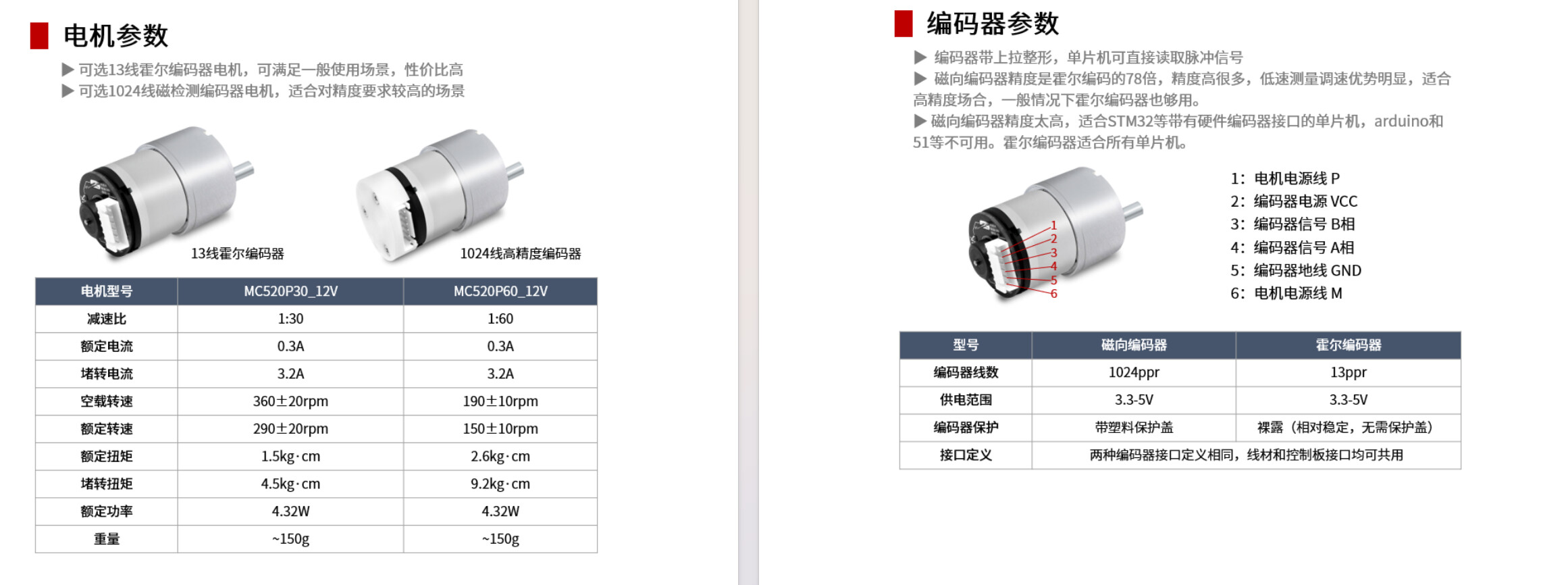
I found an Ackerman Rover, using wheel encoders, as below
Maybe I should follow Wheel Encoders — Rover documentation, but I still have no idea about ESC.
Anyone can help and give me a light on how to set up an ArduRover, especially on motor and esc?
PS: I think other component should be same as Arducopter, such as receeiver, telemetry, gps, camera etc.