I tried to test motors on quad plane vtol and I struggle with oscillation of vtol’s arm.
the heavy oscillation occurs when quad motors spin at 50 percent throttle.
What problem? What is the point of this test? The motor excites what its mounted to as RPM changes. So what?
And what does s single motor test have to do with Arduplane?
The problem that happen when I order the motor to rotate by connect the motor to the receiver and controlling it via the remote control. After accelerating the rotation of the motor to a certain speed Causing the motor to vibrate and produce the sound that appears in this video
Unrelated to the oscillations, but:
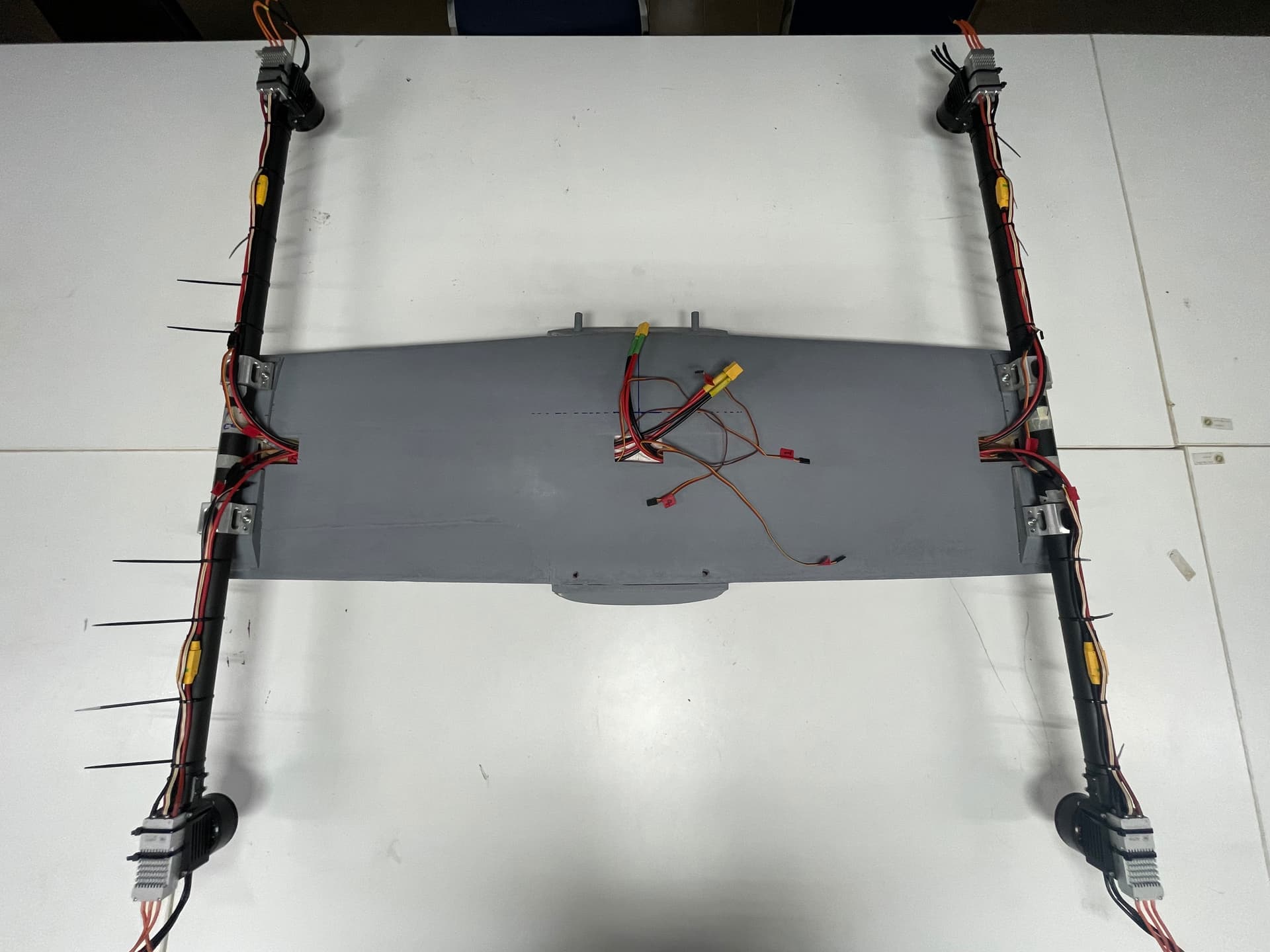
You’ll need to remove the connectors in the power wires running along the booms, and fit capacitors at or very close to the ESCs. Also try and fit capacitor banks in the wing directly after the power connectors in the middle. That is very long power wiring.
Also you’ll probably need to use twisted wires for all your signals, or maybe even shielded cable. Actually I doubt the PWM signals will work reliably (or at all) over that distance if this assembly is as big as I think it is, and certainly once all the current starts flowing and electrical interference goes through the roof!
A better way would be to use CAN bus for the boom motors and put CAN PWM nodes, 1 on each boom.
The Can nodes would probably fit inside the wing in that opening next to the boom. http://www.mateksys.com/?portfolio=can-l4-pwm
I think T-motor have done themselves and everyone a dis-service by almost promoting that the ESCs have to be right at the motors. The whole setup would be better with the ESCs mounted more centrally and the motor wires could be extended. That would be normal for all ESCs other than T-Motor.