I am try to read esc data in Hobbywing X ROTOR X8 100 Kv. I am trying read esc data usb ttl but ı dont read actually data is coming but ı dont show serial port terminal. Can ı do without hobbywing datalink ? I couldn’t find any documentation on connecting to the ESC other than datalink. With which communication protocol does hobbywing XROTOR X8 ESCs send data?
Can you help me please ?
Thanks for answer I couldn’t find anything to solve my problem on the page you sent. My motor data cable colour are black , red and white but this video green and yellow .
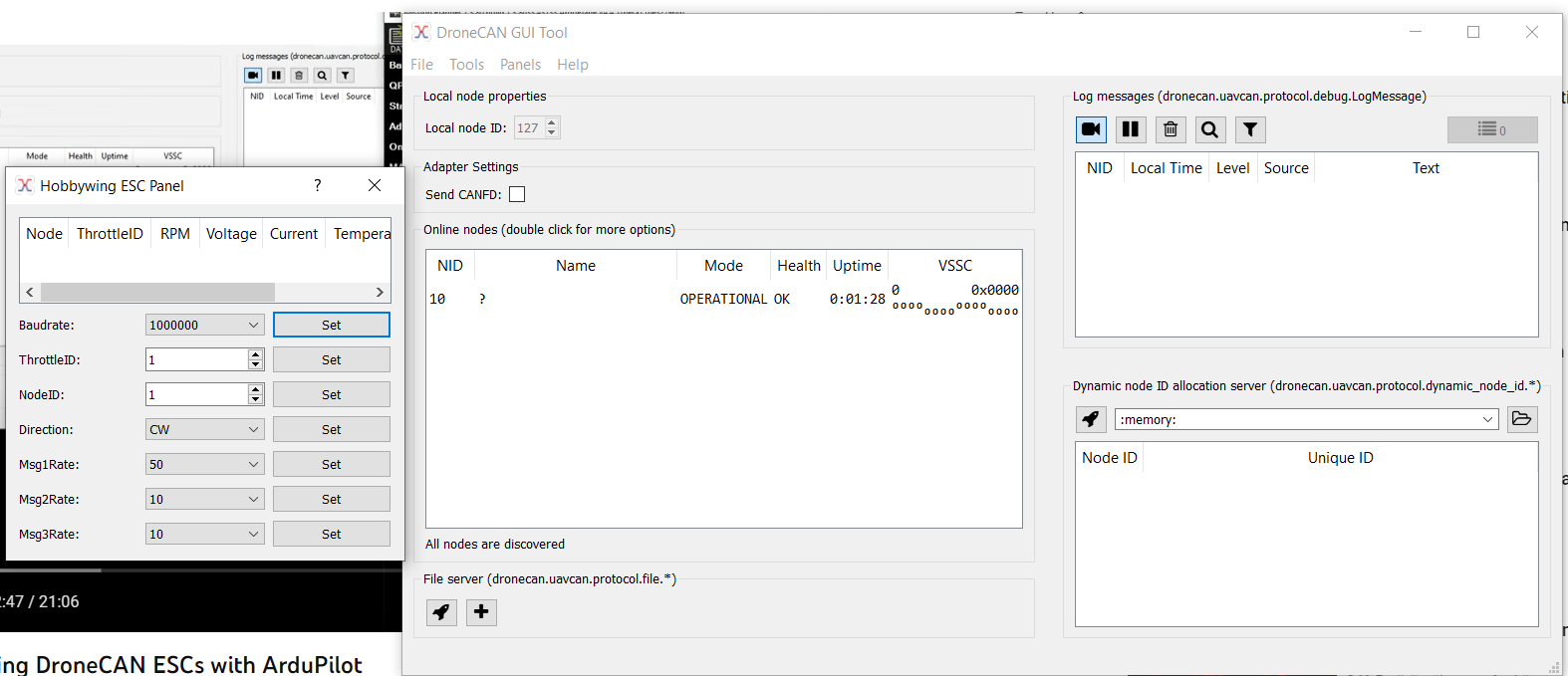
Actually, I am trying to do the same thing as in this video, but when I connect to the drone can gui, I cannot access the data. I am sharing with you what I see on my screen. I would be happy if you help.
Hello Osman,
Were you able to decode current information?
I am trying to get current data but i think there is some problem with the formula given in the protocol document.
I am using Hobbywing X Rotor Pro HV200A ESC. Voltage and RPM data has been decoded. Having trouble with current.