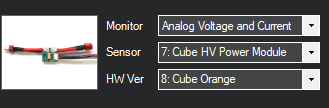
I’ve confirmed that setting the voltage and current monitor to
Sensor: 7:Cube HV module
HW Ver: 8:Cube Orange
worked Ok without any modifications and gave believable current (and voltage) readings on a quadcopter.
I’ve confirmed that setting the voltage and current monitor to
Sensor: 7:Cube HV module
HW Ver: 8:Cube Orange
worked Ok without any modifications and gave believable current (and voltage) readings on a quadcopter.