Hi all,
I need help to properly setup Talon 35 esc on my blade 4503D helicopter.
Currently i am using H_RSC_MODE 2 (RSC setpoint set to 70%) and would like to setup my governor while keeping the soft spool option.My H_RSC_RAMP_TIME is set to 9.There is no rpm sensor on my heli but esc has a governor mode for heli applications.Setting Up Set RPM Governor Mode.pdf (265.1 KB)
How can i accomplish this in a proper way?I am attaching talon governor setup pdf. Many thanks.
So I’m not quite sure what you are asking. The castle creations ESC governor is pretty easy to set up following the directions. Maybe it is the integration with ardupilot that you are uncertain of. So go through the instructions with your ESC to set up the governor.
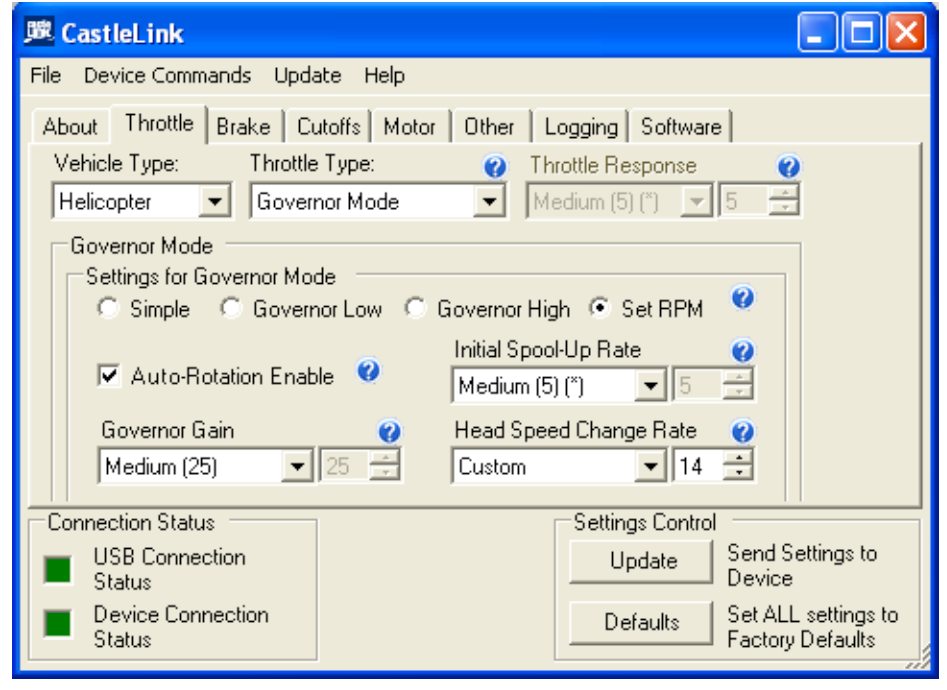
So I think all of the settings here are appropriate. I will normally deselect the Auto-Rotation Enable. This allows you to do autorotations and when you have this selected, you would set a throttle setting with throttle hold on to tell the ESC that you want a fast spool up. Currently that feature of the ESC is difficult to use with ardupilot so I would just turn it off.
If you want a slower initial spool up rate then use the pull down box and select slow.
Now for ardupilot, the only different you want to do now that you are using the ESC governor is set your ramp rate to 1 second. The H_RSC_RAMP_TIME is how quickly the throttle is raised to the setpoint value. The throttle output at this point is like a switch that tells the ESC governor to start or stop the rotor. Now the throttle output value does tell it which speed to use. You can set up to three different rotor speeds in the ESC governor. So you will pick one based on your RSC_SETPOINT value.
Thanks a lot Bill for the detailed help.Yes i meant by it’s integration with ardupilot.I followed your instructions and after entering motor pinion and main gear teeth count ,motor kv and no. of poles,I was able to setup governor properly.I set my head speed to 2700 and its working fine.My head speed it locked now.
Now as i am able to hover and fly my helicopter, i will be proceeding to tuning and will have lots of questions:)
I hovered my heli at 2700 head speed and found that its hovering at around 1700 µs RC OUT on CH3 out and 70% throttle stick with my current battery .But i want to hover it at mid stick and would like set:
IM_STB_COL_1
IM_STB_COL_2
IM_STB_COL_3
IM_STB_COL_4
so that it hovers at mid stick.I tried to watch the video but couldn’t understand it properly as its my first setup.
So how to set it up so that at mid stick,my heli doesn’t drop after going from position hold to stabilize mode.Thanks.
Wondering if its possible to adjust RSC_SETPOINT value on the fly using any channel?
Asking because castle creations esc has 3 rpm points and i want to select either one during the flight in case i want to have some crisp and fast flying. My heli is setup for slowest governed head speed that esc allows for the sake of efficiency and long flight time but from time to time i want high head speed for fun.
@ninja_zx11 if you are flying with a GCS then you can do it in the GCS by changing the parameter itself to the other 30, 70, 100 % values that the ESC is looking for to determine the Governor RPM setting that you want.
If you are only flying on the transmitter with out a GCS then it is more risky to set up for multiple RPMs because it will require using RSC mode 1 (passthrough). Depending on your transmitter and receiver, the motor could be shutdown in flight if you experienced a lost link with the transmitter. Before using RSC mode one, you need to be sure you understand what will happen when the controller experiences a transmitter failsafe. That depends entirely on what the receiver does on the RSC channel for its failsafe programming. I would recommend testIng this on the bench.
The other thing you need to be cautious with is your tune settings. Rotor speed can affect your tuning and potentially cause oscillations. I think it would be worse going from having tuned the heli with a low rotor speed and then switching to a higher rotor speed where the aircraft would be more responsive to your inputs. You would more likely encounter feedback oscillations in the case.
I do use 3 mode switch to change RPM’s (radio mixer configuration).
As bill mentioned, you must configure your receiver to hold data during link lost,otherwise motor might halt, also check your AP behavior on radio lost and low battery (mine is doing nothing), as was mentioned here, it is also good to eliminate crash recognition.
found out that changing RPM during flight does not always bring the designed RPM, I think this is due to the governor locking on a different RPM, suspect that the load on the rotor makes the difference.
So i use the RPM change on ground with collective at zero pitch.
Also RPM sensor is real easy and low cost to install, i have them on all my helis.
usually on the larger castle creation ESC there is RPM out connector,