Hey guys,
Cube with 3.5.3
Frame: Y6B
Motors: 150KV with large Props
2 parallel batteries, used less than 30% on both logs (fully loaded before each tune)
Hover at around 50% throttle.
No payload, zero moving parts
AUTOTUNE_AGGR = 0.05
ATC_RAT_RLL_FILT, ATC_RAT_PIT_FILT = 10 Hz
Vibration around 3-4, no clipping in normal flight.
Voltage and current sensing was not available at the time. 
I “tuned” Rate Roll/Pitch over Pos6 “Switch” first.
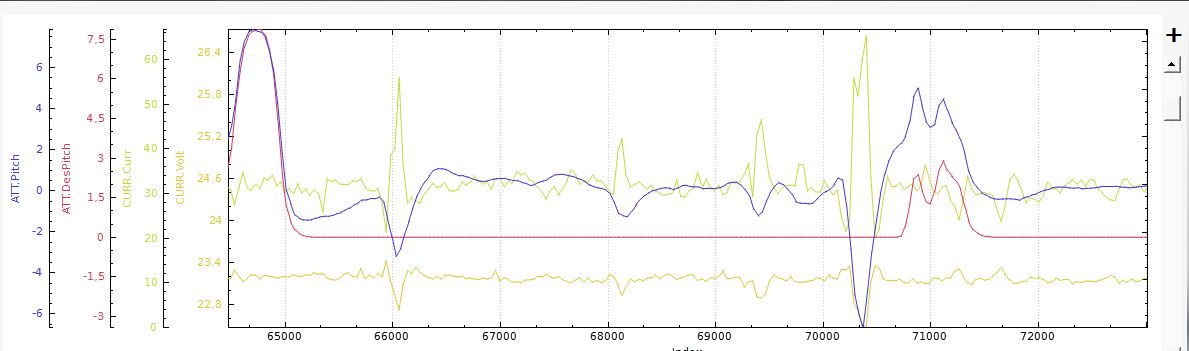
First log shows partial AutoTune on Roll axis. I stopped that early and transfered the values from RP and RD to Roll and Pitch values. Because I saw some weird movements after AutoTune pushed SP to 6, I reduced that from 4.5 to 3 for the second tune.
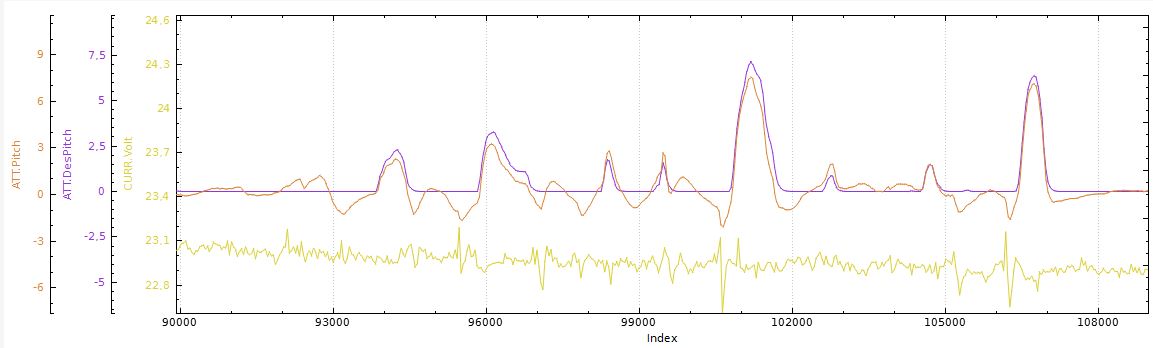
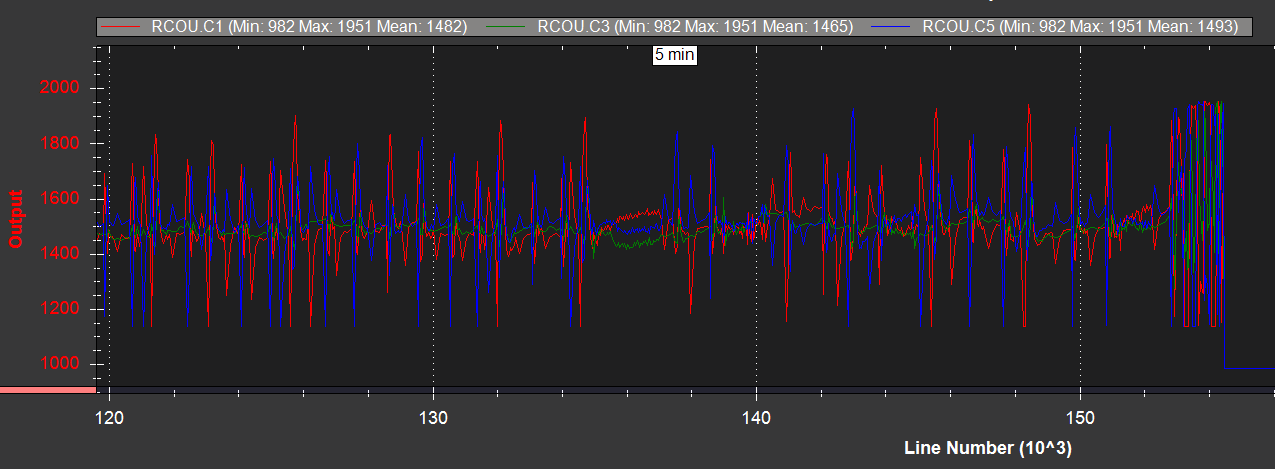
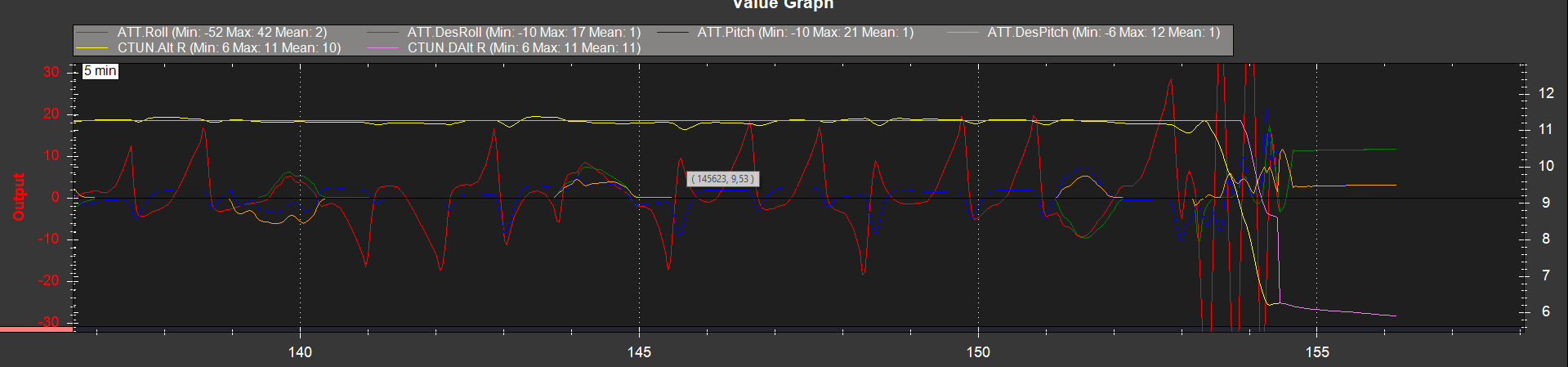
Second log shows the second tune on roll axis, with heavy oscillation because of RcOut saturation in the end.
Logs can be found here:
https://drive.google.com/drive/folders/1_MC1KUKJuuH7NQZYxW-bIhTjFDyP7zbx?usp=sharing
Have a look:
Which parameter should I change to achieve a gentle first AutoTune?
Values saved alongside the second AutoTune log.
ATC_ACCEL_P_MAX 57458.26
ATC_ACCEL_R_MAX 68978.54
ATC_ACCEL_Y_MAX 15591.96
ATC_ANG_LIM_TC 1
ATC_ANG_PIT_P 3
ATC_ANG_RLL_P 3
ATC_ANG_YAW_P 3
ATC_ANGLE_BOOST 1
ATC_RAT_PIT_D 0.0255
ATC_RAT_PIT_FF 0
ATC_RAT_PIT_FILT 10
ATC_RAT_PIT_I 0.1
ATC_RAT_PIT_IMAX 0.5
ATC_RAT_PIT_P 0.388
ATC_RAT_RLL_D 0.0255
ATC_RAT_RLL_FF 0
ATC_RAT_RLL_FILT 10
ATC_RAT_RLL_I 0.1
ATC_RAT_RLL_IMAX 0.5
ATC_RAT_RLL_P 0.388
ATC_RAT_YAW_D 0
ATC_RAT_YAW_FF 0
ATC_RAT_YAW_FILT 2.993684
ATC_RAT_YAW_I 0.02
ATC_RAT_YAW_IMAX 0.5
ATC_RAT_YAW_P 0.2
ATC_RATE_FF_ENAB 1
ATC_SLEW_YAW 6000
ATC_THR_MIX_MAN 0.5
ATC_THR_MIX_MAX 0.5
ATC_THR_MIX_MIN 0.1
AUTOTUNE_AGGR 0.05
AUTOTUNE_AXES 1
AUTOTUNE_MIN_D 0.001
MOT_SPOOL_TIME 0.5
MOT_THST_EXPO 0.65
MOT_THST_HOVER 0.2829197