Ahhhh! This is embarrassing!
I had missed the TOW section!
My apologies.
I will review it as soon as possible.
Thanks for your answers.
I can’t install the program because it detects the presence of a visus in C:\ Program files (x86).…
Can someone help me solve the problem
Thanks

McAfee
.
1 Like
Resolved.
The values of PSC_ACCZ_I and PSC_ACCZ_P were too large for the large copter.
Setting 1.0 and 0.5 to 0.4 and 0.2 (2xMOT_THST_HOVER, MOT_THST_HOVER), respectively, solved the problem.
Thank you very much.
Post the .zip file with the .parm files again.
Got it.
I’m off from today and won’t be at work, so I’ll upload it on Monday.
Thak you for all the work you put into both the writeup and configurator! Very simple instructions.
One request for the configurator: what about when we use something like MAVLink-RC branch of ELRS where we are doing both Telemetry and RC Override messages over a single serial and not using a separate RC. In this case, we won’t have a Protocol 23 RX on the FC, but the configurator won’t let me have a blank entry in that field and therefore the default param file has incorrect hardware settings.
Thanks again! Hopefully I didn’t miss the solution in this topic.
Your welcome, i like helping out.
Another user asked me for that same feature and I can swear I already implemented that. The telemetry serial port should be used twice.
If it does not work, we have a regression ![]()
I’ll re-fix that once I’m back in the office. Currently I’m away in vacation
Edit as a workaround you can deselect the respective upload checkbox in the gui
Thanks for the quick reply
I downloaded my 0.8.6 configurator on 18JUN from the github. Maybe I’ll try dev build! Enjoy your vacation
I updated the anwer above
Hello.
I am uploading the flight log after changing the parameters and the fear footage taken afterwards.
The reason I skipped the quick tune and compass mot is because for some reason the scripts didn’t work.
(I checked after I got back to the office and found that I put the scripts in the wrong folder)
When I followed the procedure and did the AUTOTUNE with Loiter, there was a Yaw movement and a significant attitude disturbance, and I had to land the plane in a hurry.
I will check the weather and run quick tune and compass mot and then do auto tune.
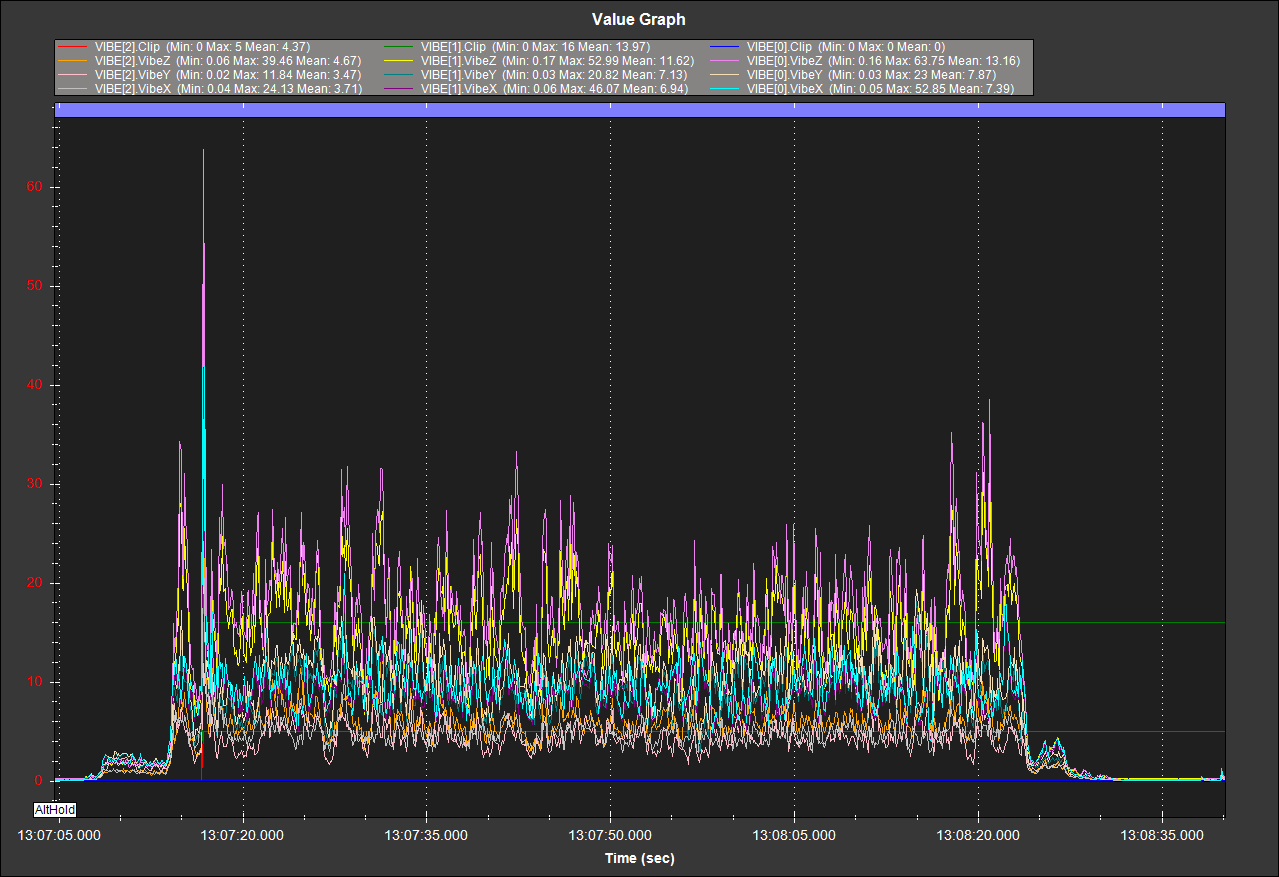
1.ALTHOLD flight after changing the PSC_ACCZ_I, P
2. log of AUTOTUNE
3.AUTOTUNE movie
4.Aircraft data in Methodic configurator
Translated with DeepL.com (free version)
1.after ALTHOLD
20240624_1_ALTHOLD_2024-06-20 14-07-02.bin - Google Drive
2.after AUTOTUNE
3.AUTOTUNE movie
4.Vehicle params / Methodic configurator
It is mentioned in the document, as expected. so for beginner pilots, it is not advised to use it.
If you do not have space constraints, and wait for low windy days, I suggest you use Althold to trigger Autotune. Before that, make sure you have a low-noise and low-vibration drone. Do small pitch and roll movements with Althold to ensure you can drive the drone back if drifts too far away.
INS_LOG_BAT_MASK, you may want to do all three, since all INS_USEx are 1. CUAV-X7 supported three.
2 Likes
Thank you, Jai.GAY!
I have read the documentation and understand how it works.
Next I will run it with ALTHOLD.
Also change INS_LOG_BAT_MASK from 3 to 7.
Appreciate your advice.
hello ı cant unsderstand how to configure correct filter setttings. ı performed first flight and my logs here.
You need to post a .zip file with the contents of the ArduPilot Methodic configurator configuration directory that you created.
Which part of the filter settings don’t you understand?
umitf450.zip (274.5 KB)
Thank you for your help. I successfully completed my first flight. I am reviewing the flight data on the ArduPilot Filter Review Tool website, but even when I change the filter settings, there is no significant change. I couldn’t interpret what the values of INS_GYRO_FILTER and INS_HNTCH_FREQ should be.
-
INS_GYRO_FILTER should be kept at the value suggested by the ArduPilot methodic configurator (assuming you configured all components correctly in the ArduPilot methodic configurator component editor window)
-
INS_HNTCH_FREQ should be the frequency of the highest peak in the diagram
First I would like to thank you @amilcarlucas and all who contributed for that helpful set of tools.
Regarding the Methodic Configurator, I suggest to check the parameter BRD_BOOT_DELAY. In configurations with CAN devices (e.g. HereFlow), this is typically set to something like 3000 or even more, to give the device some time for initialization. In my case, this delay prevents the MethodicConfigurator from re-reading the FC parameters after a reboot triggered from that tool, because the reboot takes longer than expected. At the moment, I have to close and re-open the configurator tool after a reboot in order to make sure, all parameters are successfully read. You should add the BRD_BOOT_DELAY to the 7 seconds that you already wait before starting the reading procedure.
I also have a question regarding setting the notch filter frequency.
For my build (a 6S quadrotor with 24" props and Pixhawk 6X), the initially “guessed” parameters were:
INS_GYRO_FILTER: 20 Hz
INS_HNTCH_FREQ: 28 Hz
INS_HNTCH_BW: 20 Hz
INS_HNTCH_ATT: 20 dB
INS_HNTCH_REF: 1
INS_HNTCH_FM_RAT: 1
INS_HNTCH_HMNCS: 1
I set the INS_HNTCH_MODE to 4 (Dynamic FFT) because I am using T-Motor ESCs that do not provide RPM.
When I upload the .bin log from the first flight to the filter review web tool, I see this diagram:
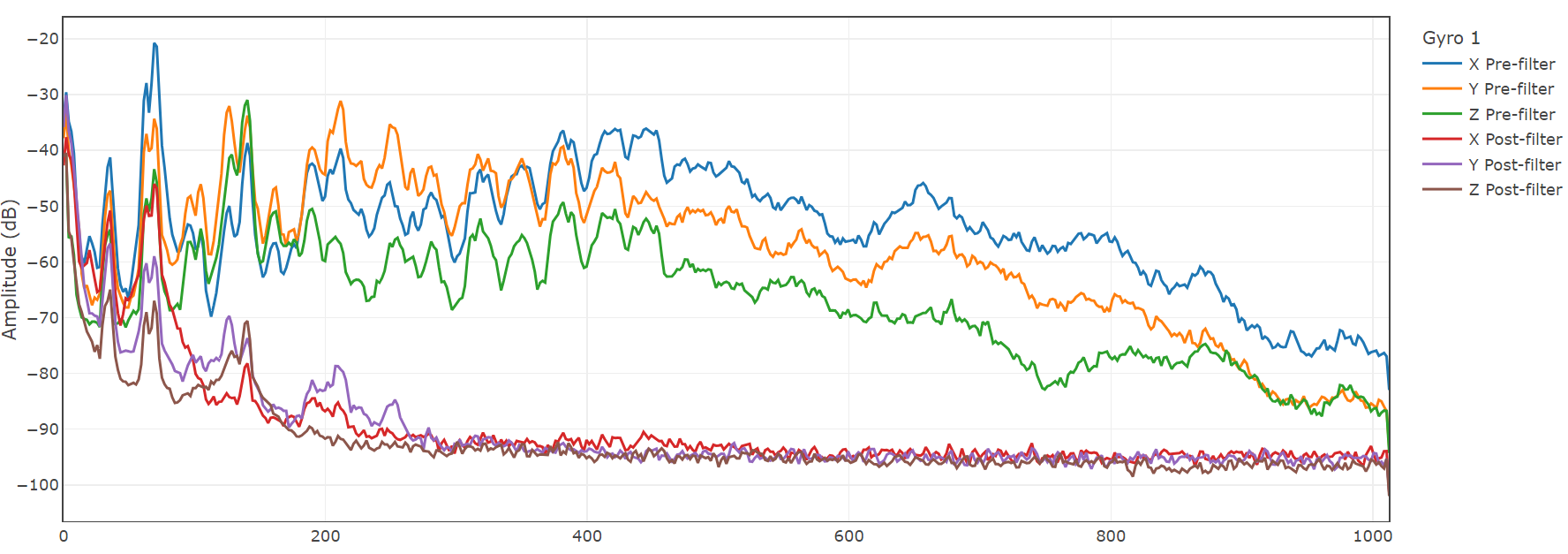
A first peek is visible at 35.6 Hz and the next is at 69.22 Hz which is the highest.
The recommendation says, the INS_HNTCH_FREQ should be set to the highest peak (at 69 Hz) but as I think, my highest peak is already the first harmonic, I think it makes more sense to set it to 35 Hz.
When I set
INS_HNTCH_FREQ: 35 Hz
INS_HNTCH_ATT: 30 dB
INS_HNTCH_HMNCS: 3
I get the following graph. For simplicity, I switched off the curves for Y and Z and actived the estimated post-filtering and the notch tracking:

It surprises me, that the notch centers are shown at around 200, 400 and 600 Hz with a very wide bandwidth. So, the effect on the peaks is quite little.
What am I doing wrong here?
You can find the bin log from the first flight here:
The tool has a --reboot-time command line parameter to increase it’s expected boot time and achieve exactly what you want.
But I will try to implement your suggestion, in order to automate this.