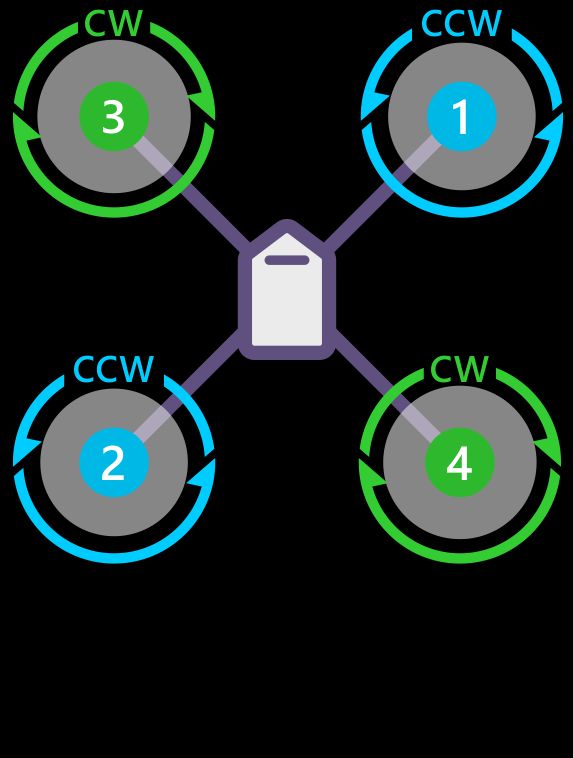
If the Propeller directions (when looked from above the vehicle) match the diagram and the ABCD motor order test is correct, it will work. It does not matter if pointing up or down.
Actually it doesn’t work properly, here is my solution:
1、set the frame to OctoQuad
2、Only plug in ESC No. 5, 6, 7 and 8 on autopilot.
3、It can work well then
Swap ESC connections at the FC if the order isn’t correct
Swap two of three motor wires if spin direction ist reversed or reverse it in software (if you have BLHeli_32 ESCs), make sure you swap any prop as well
Recheck motor order and direction if you changed anything