I am new to diy drone. My drone does not have Transmitter and Receiver. It has Arducopter v2.8, hexacopter and a GPS module with compass.
I am a mac OS user, I installed APM Planner 2.0 and found a way to upload Python Script which is install “MAVProxy” by using terminal. However, I can’t upload the script to the APM to execute it.
Terminal installation:
sudo pip install mavproxy
sudo pip install dronekit
I tried to have two terminals.
First is with code “mavproxy.py --master=/dev/tty.usbmodem14201 --baudrate=115200” to read the drone.
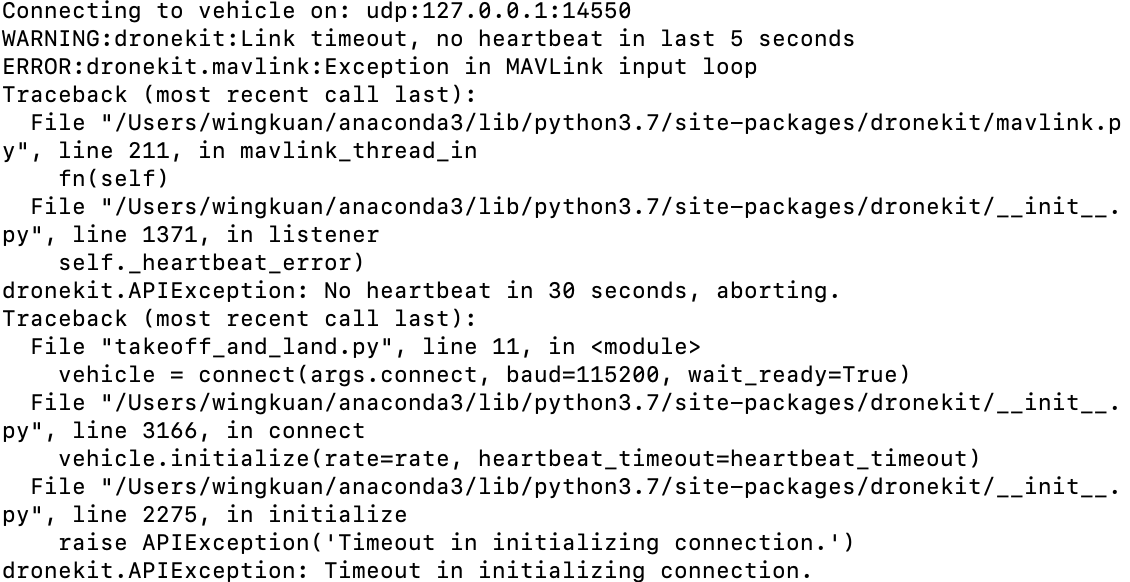
Second is “cd /Users/name/Desktop” then “sudo python takeoff_and_land.py --connect udp:127.0.0.1:14550”[https://gist.github.com/dbaldwin/9185b702091148580fa836c1911f8735#file-takeoff_and_land-py]
(Attached results below)
version of lists:
dronekit 2.9.2
dronekit-sitl 3.3.0
pymavlink 2.4.6
MAVProxy 1.8.18
Hope to get the answer (correct coding/steps) to execute the script without the RC receiver and transmitter in APM Planner 2.0.
Thank you in advance!!
Screenshot 2563-03-25 at 10.21.56 PM|535x500
{kind=link}