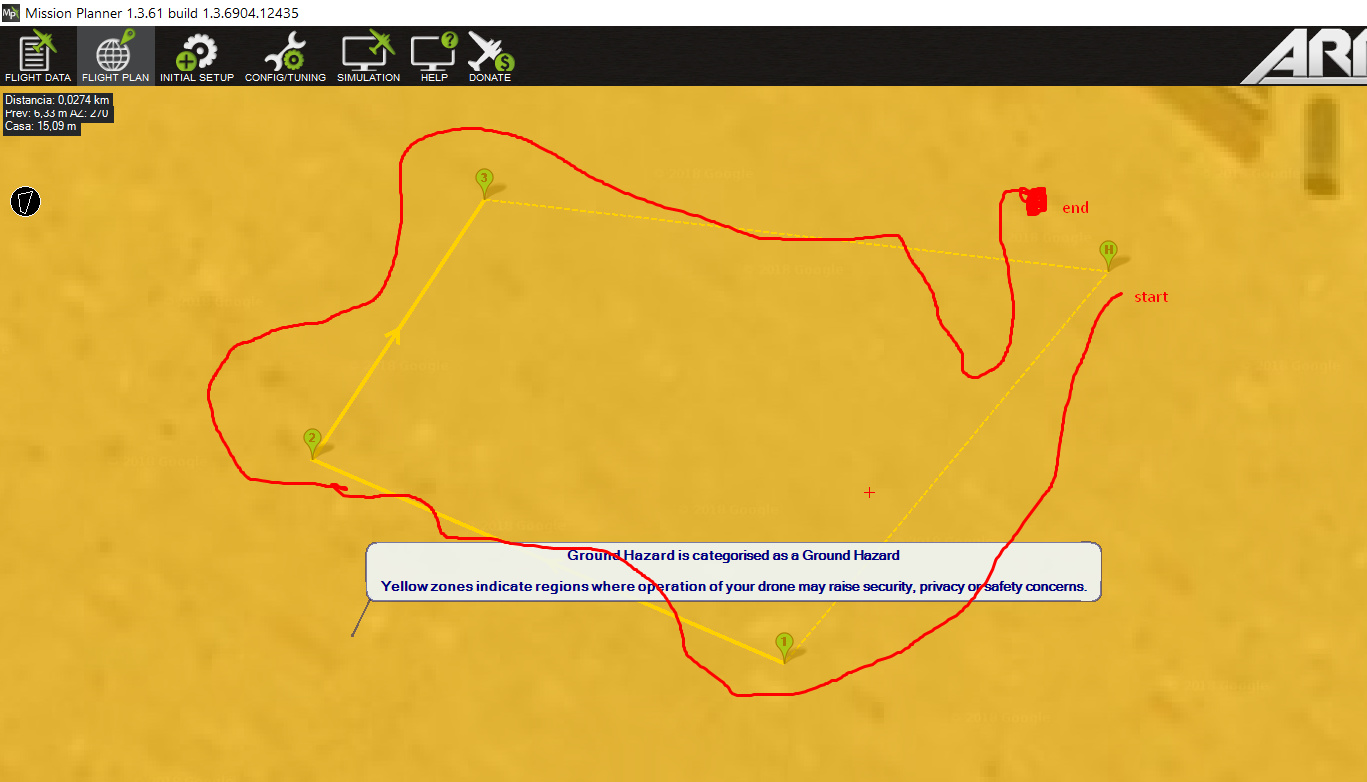
I started to test the rover and I program a simple path,
Waypoint 1, after 10 meters turn 90º right to WP2 and 10 meters plus, then turn right 90º and return
The problem is the path is not regular and exact! the gps calibration is in green and everything ok. But the rovers did the path roughly, not reaching exactly the WP, and doing curves, not straight lines