hello, everyone i wanted your help on how i can configure servos on misson planer and use bbblue
Hi,
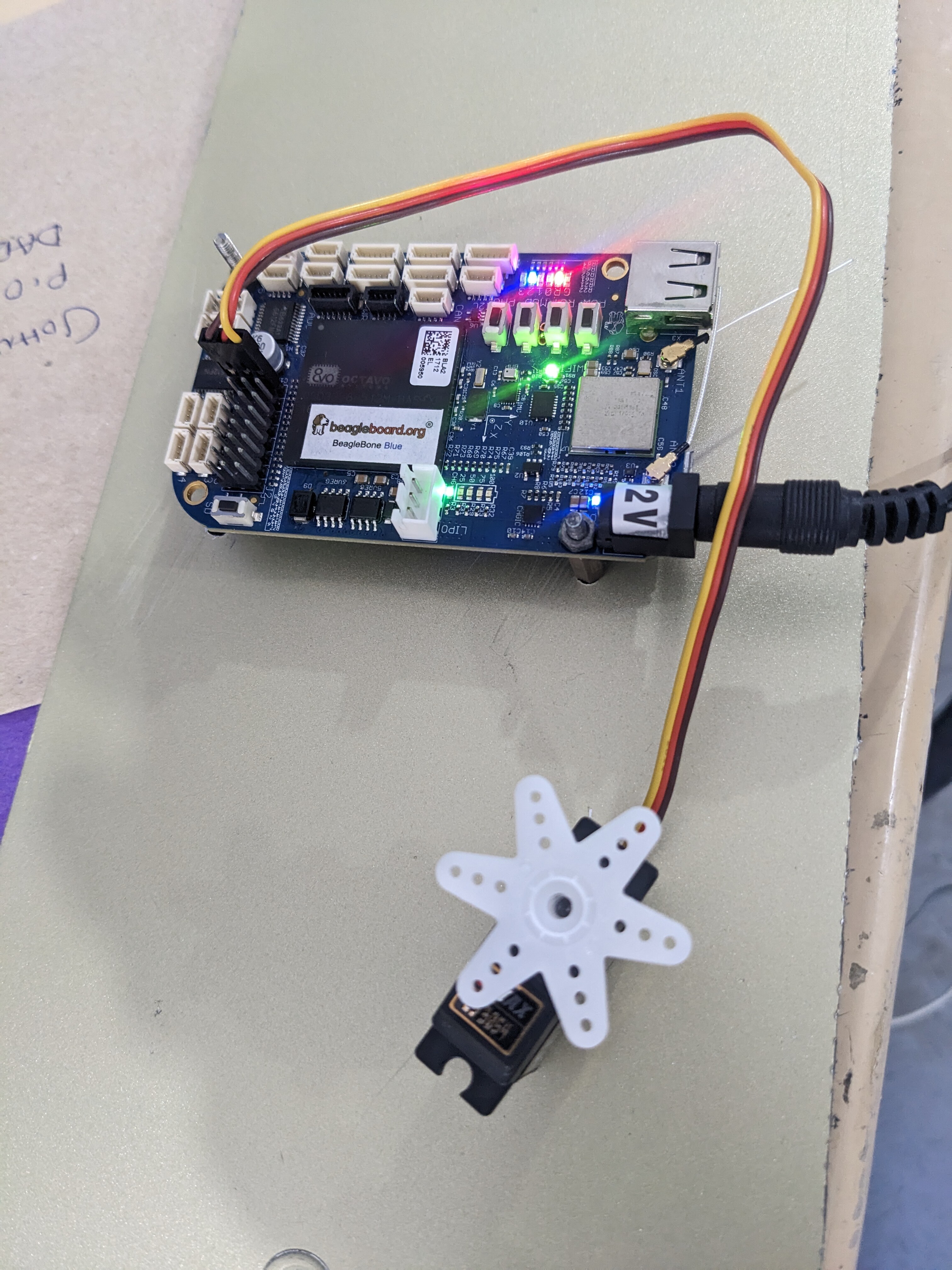
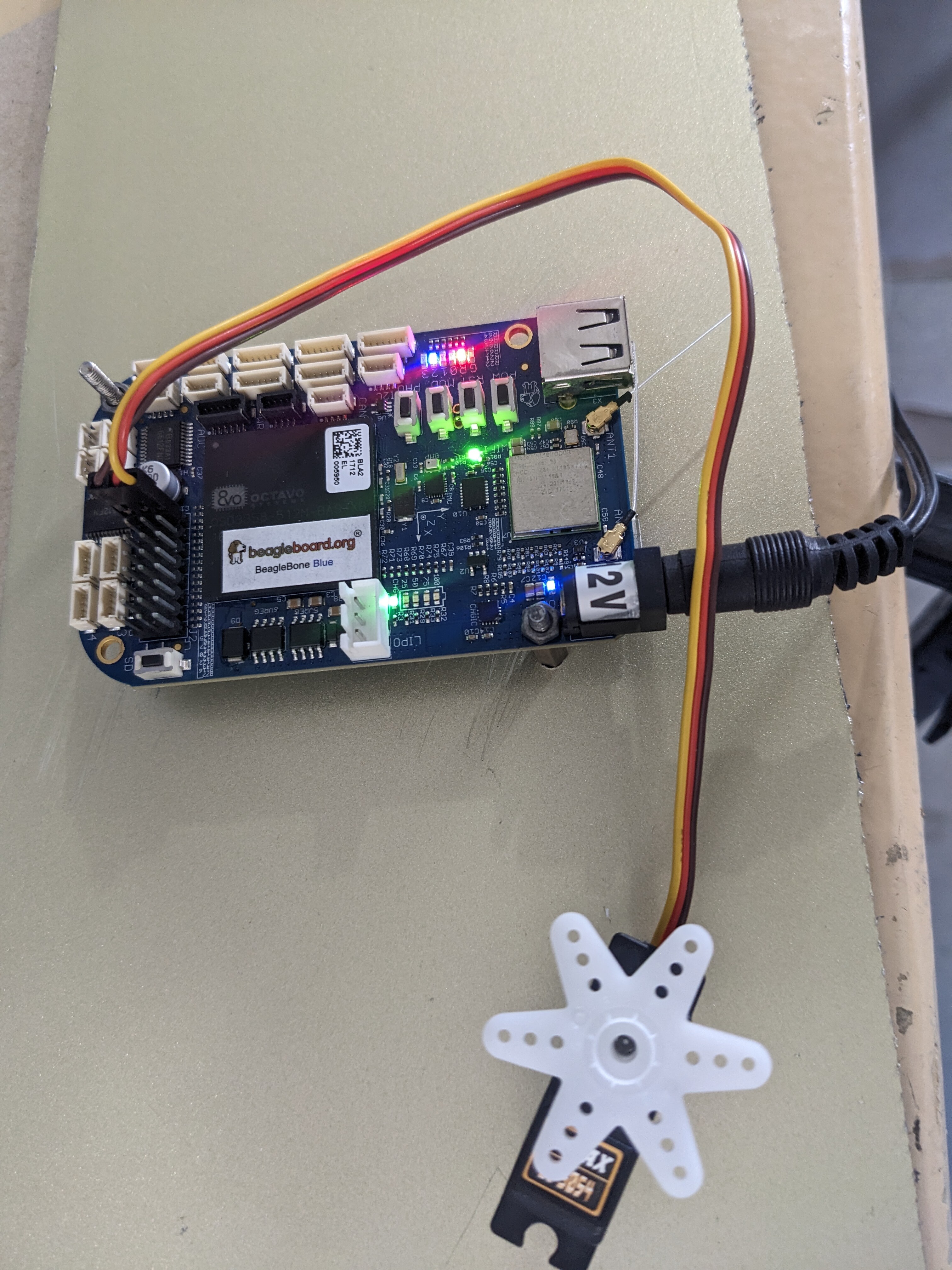
What would be the servo usage ? Aileron, elevon ? Is just set the servo output in the servo output tab the function related of what you want. One important thing is to power the servo rail with an external 5v power source instead the beaglebone internal source.
Thank you is it possible to control servos using Mission planner and bbblue, am i currently working with developing a fixed wing plane so am new to this board and technology
Hi,
if you set the servo output as elevon for instance, and running ardupilot and setting the flight mode as fbwa, then you move de board the servos should move too once the fbwa is an stabilized mode. The same will happen if you connect the receiver and move the sticks.
What kind of control are you talking about ?
Actually i don’t have Stick to control the servos so i need to configure and control motors by mission planner i wanted to know how to configure and send those commands to the beaglebone blue board
What kind of vehicle are you planning to use ?
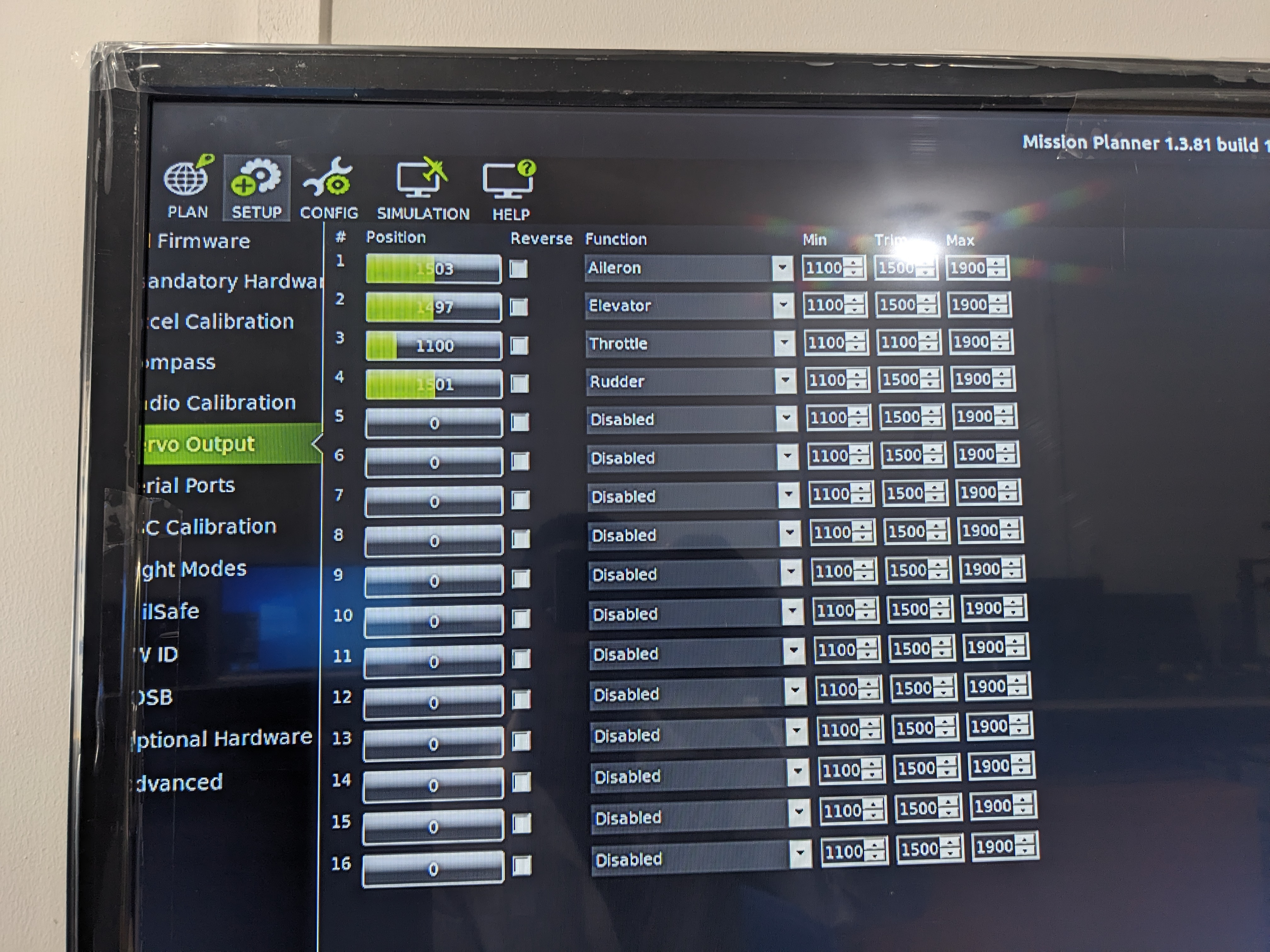
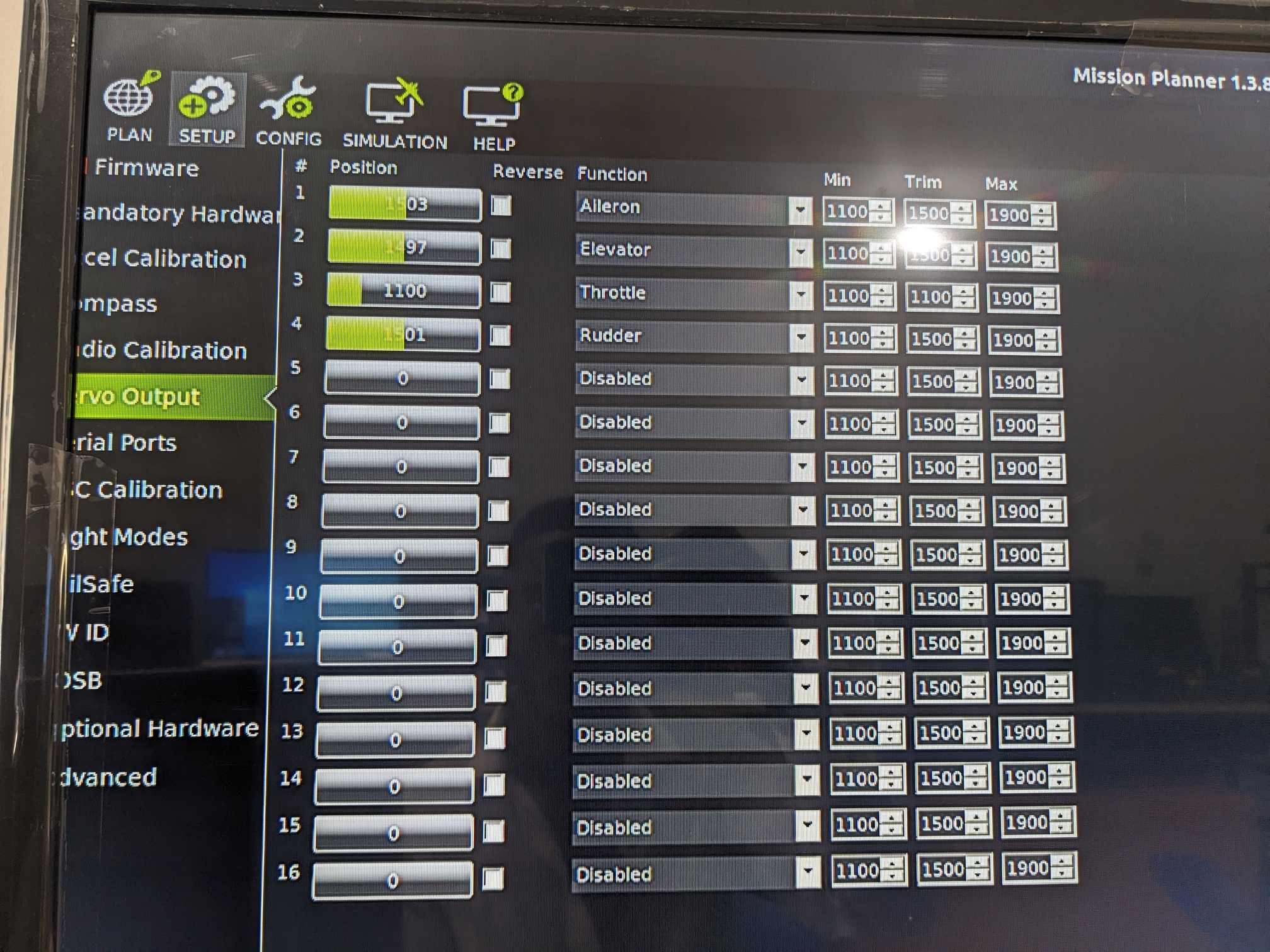
You need to configure the servo tab on mission planner, the related output as servo - if the vehicle is a plane of type delta wing for instance, one servo output will be left elevon, the other right elevon and the other throttle.
Once you run arduplane and the servo is powered, set the flight mode as fbwa and if you move your beagle, the servos will be moving according you roll your board.
my vehicle is plane fixed wing, to the servo output 1.Aileron 2.Elevator 3.Throttle 4.Rudder but nothing was observed to the servos, what i need you to help me, is how can i configure mission planner to control the servos, or what needs to be done?, servos should be powered directly from the bbblue or external power source should be used to support, since am using the 12v adapter to power servos
Hi,
until what I know the servos must be 5 volts not 12.
In all my cases, powering the servos using the beagle power source is a bad idea because the current is not enough to do that, so I recommend to use an 5 volts bec on the servo rails.
Can you post the result of the dmesg command? We need to check if the pru is working, what is the kernel version are you using ? I recommend too, compile the servo test program - inside the ardupilot directory there is Tools/Linux_HAL_Essentials/pru/aiopru then run a make test to compile the RcAioPRUTest I dont remember if is necessary to install the pasm to run that ( you can have if on GitHub - beagleboard/am335x_pru_package)
running this test program the servo should move in a randon pwm values.
debian@beaglebone:~$ dmesg
[ 0.000000] Booting Linux on physical CPU 0x0
[ 0.000000] Linux version 4.19.94-ti-r73 (voodoo@rpi4b4g-13) (gcc version 8.3.0 (Debian 8.3.0-6)) #1buster SMP PREEMPT Fri Apr 15 21:38:30 UTC 2022
[ 0.000000] CPU: ARMv7 Processor [413fc082] revision 2 (ARMv7), cr=10c5387d
[ 0.000000] CPU: PIPT / VIPT nonaliasing data cache, VIPT aliasing instruction cache
[ 0.000000] OF: fdt: Machine model: TI AM335x BeagleBone Blue
[ 0.000000] Memory policy: Data cache writeback
[ 0.000000] efi: Getting EFI parameters from FDT:
[ 0.000000] efi: UEFI not found.
[ 0.000000] cma: Reserved 48 MiB at 0x9c800000
[ 0.000000] On node 0 totalpages: 130560
[ 0.000000] Normal zone: 1148 pages used for memmap
[ 0.000000] Normal zone: 0 pages reserved
[ 0.000000] Normal zone: 130560 pages, LIFO batch:31
[ 0.000000] CPU: All CPU(s) started in SVC mode.
[ 0.000000] AM335X ES2.1 (sgx neon)
[ 0.000000] random: get_random_bytes called from start_kernel+0xac/0x4c0 with crng_init=0
[ 0.000000] percpu: Embedded 17 pages/cpu s38988 r8192 d22452 u69632
[ 0.000000] pcpu-alloc: s38988 r8192 d22452 u69632 alloc=17*4096
[ 0.000000] pcpu-alloc: [0] 0
[ 0.000000] Built 1 zonelists, mobility grouping on. Total pages: 129412
[ 0.000000] Kernel command line: console=ttyS0,115200n8 bone_capemgr.uboot_capemgr_enabled=1 root=/dev/mmcblk1p1 ro rootfstype=ext4 rootwait coherent_pool=1M net.ifnames=0 lpj=1990656 rng_core.default_quality=100 quiet
[ 0.000000] Dentry cache hash table entries: 65536 (order: 6, 262144 bytes)
[ 0.000000] Inode-cache hash table entries: 32768 (order: 5, 131072 bytes)
[ 0.000000] Memory: 437752K/522240K available (13312K kernel code, 1142K rwdata, 4344K rodata, 1024K init, 350K bss, 35336K reserved, 49152K cma-reserved, 0K highmem)
[ 0.000000] Virtual kernel memory layout:
vector : 0xffff0000 - 0xffff1000 ( 4 kB)
fixmap : 0xffc00000 - 0xfff00000 (3072 kB)
vmalloc : 0xe0000000 - 0xff800000 ( 504 MB)
lowmem : 0xc0000000 - 0xdfe00000 ( 510 MB)
pkmap : 0xbfe00000 - 0xc0000000 ( 2 MB)
modules : 0xbf000000 - 0xbfe00000 ( 14 MB)
.text : 0x(ptrval) - 0x(ptrval) (14304 kB)
.init : 0x(ptrval) - 0x(ptrval) (1024 kB)
.data : 0x(ptrval) - 0x(ptrval) (1143 kB)
.bss : 0x(ptrval) - 0x(ptrval) ( 351 kB)
[ 0.000000] SLUB: HWalign=64, Order=0-3, MinObjects=0, CPUs=1, Nodes=1
[ 0.000000] ftrace: allocating 42221 entries in 124 pages
[ 0.000000] rcu: Preemptible hierarchical RCU implementation.
[ 0.000000] rcu: RCU restricting CPUs from NR_CPUS=2 to nr_cpu_ids=1.
[ 0.000000] Tasks RCU enabled.
[ 0.000000] rcu: Adjusting geometry for rcu_fanout_leaf=16, nr_cpu_ids=1
[ 0.000000] NR_IRQS: 16, nr_irqs: 16, preallocated irqs: 16
[ 0.000000] IRQ: Found an INTC at 0x(ptrval) (revision 5.0) with 128 interrupts
[ 0.000000] OMAP clockevent source: timer2 at 24000000 Hz
[ 0.000023] sched_clock: 32 bits at 24MHz, resolution 41ns, wraps every 89478484971ns
[ 0.000043] clocksource: timer1: mask: 0xffffffff max_cycles: 0xffffffff, max_idle_ns: 79635851949 ns
[ 0.000053] OMAP clocksource: timer1 at 24000000 Hz
[ 0.001568] timer_probe: no matching timers found
[ 0.001907] Console: colour dummy device 80x30
[ 0.001992] Calibrating delay loop (skipped) preset value… 995.32 BogoMIPS (lpj=1990656)
[ 0.002011] pid_max: default: 32768 minimum: 301
[ 0.002294] Security Framework initialized
[ 0.002308] Yama: becoming mindful.
[ 0.002455] AppArmor: AppArmor initialized
[ 0.002560] Mount-cache hash table entries: 1024 (order: 0, 4096 bytes)
[ 0.002573] Mountpoint-cache hash table entries: 1024 (order: 0, 4096 bytes)
[ 0.003667] CPU: Testing write buffer coherency: ok
[ 0.003731] CPU0: Spectre v2: using BPIALL workaround
[ 0.004218] CPU0: thread -1, cpu 0, socket -1, mpidr 0
[ 0.025582] Setting up static identity map for 0x80100000 - 0x80100060
[ 0.033487] rcu: Hierarchical SRCU implementation.
[ 0.044726] EFI services will not be available.
[ 0.049495] smp: Bringing up secondary CPUs …
[ 0.049509] smp: Brought up 1 node, 1 CPU
[ 0.049521] SMP: Total of 1 processors activated (995.32 BogoMIPS).
[ 0.049527] CPU: All CPU(s) started in SVC mode.
[ 0.051248] devtmpfs: initialized
[ 0.077888] VFP support v0.3: implementor 41 architecture 3 part 30 variant c rev 3
[ 0.078546] clocksource: jiffies: mask: 0xffffffff max_cycles: 0xffffffff, max_idle_ns: 7645041785100000 ns
[ 0.078570] futex hash table entries: 256 (order: 2, 16384 bytes)
[ 0.082509] xor: automatically using best checksumming function neon
[ 0.082528] pinctrl core: initialized pinctrl subsystem
[ 0.083853] NET: Registered protocol family 16
[ 0.089025] DMA: preallocated 1024 KiB pool for atomic coherent allocations
[ 0.168399] l4_wkup_cm:clk:0010:0: failed to disable
[ 0.208639] audit: initializing netlink subsys (disabled)
[ 0.213595] audit: type=2000 audit(0.200:1): state=initialized audit_enabled=0 res=1
[ 0.217651] OMAP GPIO hardware version 0.1
[ 0.220667] GPIO line 106 (LS_BUF_EN) hogged as output/high
[ 0.236700] hw-breakpoint: debug architecture 0x4 unsupported.
[ 0.265646] raid6: using algorithm neonx8 gen() 0 MB/s
[ 0.265659] raid6: … xor() 0 MB/s, rmw enabled
[ 0.265667] raid6: using neon recovery algorithm
[ 0.273345] edma 49000000.edma: TI EDMA DMA engine driver
[ 0.279383] SCSI subsystem initialized
[ 0.281652] libata version 3.00 loaded.
[ 0.281940] usbcore: registered new interface driver usbfs
[ 0.281998] usbcore: registered new interface driver hub
[ 0.282132] usbcore: registered new device driver usb
[ 0.283320] pps_core: LinuxPPS API ver. 1 registered
[ 0.283330] pps_core: Software ver. 5.3.6 - Copyright 2005-2007 Rodolfo Giometti <giometti@linux.it>
[ 0.283352] PTP clock support registered
[ 0.284250] omap-mailbox 480c8000.mailbox: omap mailbox rev 0x400
[ 0.285915] Advanced Linux Sound Architecture Driver Initialized.
[ 0.286728] NetLabel: Initializing
[ 0.286738] NetLabel: domain hash size = 128
[ 0.286743] NetLabel: protocols = UNLABELED CIPSOv4 CALIPSO
[ 0.286841] NetLabel: unlabeled traffic allowed by default
[ 0.287904] clocksource: Switched to clocksource timer1
[ 0.450585] VFS: Disk quotas dquot_6.6.0
[ 0.450693] VFS: Dquot-cache hash table entries: 1024 (order 0, 4096 bytes)
[ 0.451581] AppArmor: AppArmor Filesystem Enabled
[ 0.464471] NET: Registered protocol family 2
[ 0.465497] tcp_listen_portaddr_hash hash table entries: 512 (order: 0, 6144 bytes)
[ 0.465535] TCP established hash table entries: 4096 (order: 2, 16384 bytes)
[ 0.465578] TCP bind hash table entries: 4096 (order: 3, 32768 bytes)
[ 0.465636] TCP: Hash tables configured (established 4096 bind 4096)
[ 0.465771] UDP hash table entries: 256 (order: 1, 8192 bytes)
[ 0.465795] UDP-Lite hash table entries: 256 (order: 1, 8192 bytes)
[ 0.466126] NET: Registered protocol family 1
[ 0.479332] RPC: Registered named UNIX socket transport module.
[ 0.479343] RPC: Registered udp transport module.
[ 0.479349] RPC: Registered tcp transport module.
[ 0.479354] RPC: Registered tcp NFSv4.1 backchannel transport module.
[ 0.480297] Unpacking initramfs…
[ 0.915865] Freeing initrd memory: 7240K
[ 0.916867] hw perfevents: enabled with armv7_cortex_a8 PMU driver, 5 counters available
[ 0.919737] Initialise system trusted keyrings
[ 0.920341] workingset: timestamp_bits=14 max_order=17 bucket_order=3
[ 0.927831] zbud: loaded
[ 0.935416] NFS: Registering the id_resolver key type
[ 0.935466] Key type id_resolver registered
[ 0.935471] Key type id_legacy registered
[ 0.935489] nfs4filelayout_init: NFSv4 File Layout Driver Registering…
[ 0.935858] fuse init (API version 7.27)
[ 0.946505] Key type asymmetric registered
[ 0.946519] Asymmetric key parser ‘x509’ registered
[ 0.946618] Block layer SCSI generic (bsg) driver version 0.4 loaded (major 246)
[ 0.950981] io scheduler noop registered
[ 0.950993] io scheduler deadline registered
[ 0.951307] io scheduler cfq registered (default)
[ 0.951318] io scheduler mq-deadline registered
[ 0.954293] pinctrl-single 44e10800.pinmux: 142 pins, size 568
[ 0.966981] Serial: 8250/16550 driver, 6 ports, IRQ sharing disabled
[ 0.970584] console [ttyS0] disabled
[ 0.970692] 44e09000.serial: ttyS0 at MMIO 0x44e09000 (irq = 30, base_baud = 3000000) is a 8250
[ 0.980783] console [ttyS0] enabled
[ 0.981894] 48022000.serial: ttyS1 at MMIO 0x48022000 (irq = 31, base_baud = 3000000) is a 8250
[ 0.982872] 48024000.serial: ttyS2 at MMIO 0x48024000 (irq = 32, base_baud = 3000000) is a 8250
[ 0.984100] 481a6000.serial: ttyS3 at MMIO 0x481a6000 (irq = 33, base_baud = 3000000) is a 8250
[ 0.985089] 481a8000.serial: ttyS4 at MMIO 0x481a8000 (irq = 34, base_baud = 3000000) is a 8250
[ 0.986115] 481aa000.serial: ttyS5 at MMIO 0x481aa000 (irq = 35, base_baud = 3000000) is a 8250
[ 0.989414] omap_rng 48310000.rng: Random Number Generator ver. 20
[ 0.990190] sdhci: Secure Digital Host Controller Interface driver
[ 0.990196] sdhci: Copyright(c) Pierre Ossman
[ 0.990710] omap_gpio 44e07000.gpio: Could not set line 6 debounce to 200000 microseconds (-22)
[ 0.990719] omap_hsmmc 48060000.mmc: Got CD GPIO
[ 0.991291] omap_hsmmc 48060000.mmc: Linked as a consumer to regulator.1
[ 0.991645] random: fast init done
[ 0.992200] random: crng init done
[ 1.018284] omap_hsmmc 481d8000.mmc: Linked as a consumer to regulator.1
[ 1.044879] omap_hsmmc 47810000.mmc: Linked as a consumer to regulator.2
[ 1.094442] mmc1: new high speed MMC card at address 0001
[ 1.099841] mmcblk1: mmc1:0001 S10004 3.56 GiB
[ 1.100566] mmcblk1boot0: mmc1:0001 S10004 partition 1 4.00 MiB
[ 1.101169] mmcblk1boot1: mmc1:0001 S10004 partition 2 4.00 MiB
[ 1.101531] mmcblk1rpmb: mmc1:0001 S10004 partition 3 4.00 MiB, chardev (245:0)
[ 1.107336] mmcblk1: p1
[ 1.149735] sdhci-pltfm: SDHCI platform and OF driver helper
[ 1.158021] eqep 48300180.eqep: ver. 1.0
[ 1.158287] eqep 48300180.eqep: count_mode:0
[ 1.158299] eqep 48300180.eqep: invert_qa:1
[ 1.158308] eqep 48300180.eqep: invert_qb:1
[ 1.158316] eqep 48300180.eqep: invert_qi:0
[ 1.158325] eqep 48300180.eqep: invert_qs:0
[ 1.158333] eqep 48300180.eqep: swap_inputs:0
[ 1.158343] eqep 48300180.eqep: QDECCTL:0x0180
[ 1.158351] eqep 48300180.eqep: QPOSINIT:0x00000000
[ 1.158358] eqep 48300180.eqep: QPOSMAX:0xffffffff
[ 1.158365] eqep 48300180.eqep: QPOSCNT:0x00000000
[ 1.158374] eqep 48300180.eqep: omit_interrupt:0
[ 1.158381] eqep 48300180.eqep: QEINT:0x0800
[ 1.158389] eqep 48300180.eqep: QUPRD:0x05f5e100
[ 1.158396] eqep 48300180.eqep: QEPCTL:0x009e write
[ 1.158403] eqep 48300180.eqep: QEPCTL:0x009e read
[ 1.158432] eqep 48300180.eqep: irq:60, clk_rate:100000000
[ 1.158900] eqep 48302180.eqep: ver. 1.0
[ 1.159110] eqep 48302180.eqep: count_mode:0
[ 1.159121] eqep 48302180.eqep: invert_qa:1
[ 1.159129] eqep 48302180.eqep: invert_qb:1
[ 1.159138] eqep 48302180.eqep: invert_qi:0
[ 1.159146] eqep 48302180.eqep: invert_qs:0
[ 1.159153] eqep 48302180.eqep: swap_inputs:0
[ 1.159160] eqep 48302180.eqep: QDECCTL:0x0180
[ 1.159168] eqep 48302180.eqep: QPOSINIT:0x00000000
[ 1.159175] eqep 48302180.eqep: QPOSMAX:0xffffffff
[ 1.159182] eqep 48302180.eqep: QPOSCNT:0x00000000
[ 1.159190] eqep 48302180.eqep: omit_interrupt:0
[ 1.159197] eqep 48302180.eqep: QEINT:0x0800
[ 1.159204] eqep 48302180.eqep: QUPRD:0x05f5e100
[ 1.159211] eqep 48302180.eqep: QEPCTL:0x009e write
[ 1.159218] eqep 48302180.eqep: QEPCTL:0x009e read
[ 1.159242] eqep 48302180.eqep: irq:62, clk_rate:100000000
[ 1.159518] eqep 48304180.eqep: ver. 1.0
[ 1.159640] eqep 48304180.eqep: count_mode:0
[ 1.159649] eqep 48304180.eqep: invert_qa:1
[ 1.159657] eqep 48304180.eqep: invert_qb:1
[ 1.159665] eqep 48304180.eqep: invert_qi:0
[ 1.159673] eqep 48304180.eqep: invert_qs:0
[ 1.159681] eqep 48304180.eqep: swap_inputs:0
[ 1.159688] eqep 48304180.eqep: QDECCTL:0x0180
[ 1.159696] eqep 48304180.eqep: QPOSINIT:0x00000000
[ 1.159703] eqep 48304180.eqep: QPOSMAX:0xffffffff
[ 1.159710] eqep 48304180.eqep: QPOSCNT:0x00000000
[ 1.159718] eqep 48304180.eqep: omit_interrupt:0
[ 1.159725] eqep 48304180.eqep: QEINT:0x0800
[ 1.159732] eqep 48304180.eqep: QUPRD:0x05f5e100
[ 1.159739] eqep 48304180.eqep: QEPCTL:0x009e write
[ 1.159746] eqep 48304180.eqep: QEPCTL:0x009e read
[ 1.159765] eqep 48304180.eqep: irq:64, clk_rate:100000000
[ 1.162414] omap_hsmmc 47810000.mmc: card claims to support voltages below defined range
[ 1.175631] mmc2: new high speed SDIO card at address 0001
[ 1.180881] libphy: Fixed MDIO Bus: probed
[ 1.181871] CAN device driver interface
[ 1.183415] c_can_platform 481d0000.can: c_can_platform device registered (regs=7046bda7, irq=43)
[ 1.185235] usbcore: registered new interface driver smsc95xx
[ 1.186533] ehci_hcd: USB 2.0 ‘Enhanced’ Host Controller (EHCI) Driver
[ 1.186597] ehci-platform: EHCI generic platform driver
[ 1.186894] ehci-omap: OMAP-EHCI Host Controller driver
[ 1.187714] usbcore: registered new interface driver usb-storage
[ 1.191004] am335x-phy-driver 47401300.usb-phy: 47401300.usb-phy supply vcc not found, using dummy regulator
[ 1.191190] am335x-phy-driver 47401300.usb-phy: Linked as a consumer to regulator.0
[ 1.194614] am335x-phy-driver 47401b00.usb-phy: 47401b00.usb-phy supply vcc not found, using dummy regulator
[ 1.194796] am335x-phy-driver 47401b00.usb-phy: Linked as a consumer to regulator.0
[ 1.198261] musb-hdrc musb-hdrc.1: MUSB HDRC host driver
[ 1.198327] musb-hdrc musb-hdrc.1: new USB bus registered, assigned bus number 1
[ 1.198701] usb usb1: New USB device found, idVendor=1d6b, idProduct=0002, bcdDevice= 4.19
[ 1.198713] usb usb1: New USB device strings: Mfr=3, Product=2, SerialNumber=1
[ 1.198721] usb usb1: Product: MUSB HDRC host driver
[ 1.198728] usb usb1: Manufacturer: Linux 4.19.94-ti-r73 musb-hcd
[ 1.198735] usb usb1: SerialNumber: musb-hdrc.1
[ 1.199552] hub 1-0:1.0: USB hub found
[ 1.199617] hub 1-0:1.0: 1 port detected
[ 1.211682] omap_rtc 44e3e000.rtc: registered as rtc0
[ 1.213278] i2c /dev entries driver
[ 1.216426] omap_wdt: OMAP Watchdog Timer Rev 0x01: initial timeout 60 sec
[ 1.216972] softdog: initialized. soft_noboot=0 soft_margin=60 sec soft_panic=0 (nowayout=0)
[ 1.221842] ledtrig-cpu: registered to indicate activity on CPUs
[ 1.222384] omap-aes 53500000.aes: OMAP AES hw accel rev: 3.2
[ 1.222722] omap-aes 53500000.aes: will run requests pump with realtime priority
[ 1.225298] omap-sham 53100000.sham: hw accel on OMAP rev 4.3
[ 1.228962] hidraw: raw HID events driver (C) Jiri Kosina
[ 1.236298] gnss: GNSS driver registered with major 242
[ 1.242707] NET: Registered protocol family 10
[ 1.314847] Segment Routing with IPv6
[ 1.315003] mip6: Mobile IPv6
[ 1.315159] NET: Registered protocol family 17
[ 1.315188] can: controller area network core (rev 20170425 abi 9)
[ 1.315288] NET: Registered protocol family 29
[ 1.315372] 8021q: 802.1Q VLAN Support v1.8
[ 1.315457] Key type dns_resolver registered
[ 1.315464] mpls_gso: MPLS GSO support
[ 1.315772] ThumbEE CPU extension supported.
[ 1.315788] Registering SWP/SWPB emulation handler
[ 1.315798] omap_voltage_late_init: Voltage driver support not added
[ 1.324284] registered taskstats version 1
[ 1.324298] Loading compiled-in X.509 certificates
[ 1.324435] zswap: loaded using pool lzo/zbud
[ 1.327575] Btrfs loaded, crc32c=crc32c-generic
[ 1.327688] AppArmor: AppArmor sha1 policy hashing enabled
[ 1.381646] tps6521x_pwrbutton tps65217-pwrbutton: DMA mask not set
[ 1.382503] input: tps65217_pwr_but as /devices/platform/ocp/44e0b000.i2c/i2c-0/0-0024/tps65217-pwrbutton/input/input0
[ 1.383451] tps65217 0-0024: TPS65217 ID 0xe version 1.2
[ 1.384522] at24 0-0050: 32768 byte 24c256 EEPROM, writable, 1 bytes/write
[ 1.384645] omap_i2c 44e0b000.i2c: bus 0 rev0.11 at 400 kHz
[ 1.386524] omap_i2c 4802a000.i2c: bus 1 rev0.11 at 400 kHz
[ 1.388417] omap_i2c 4819c000.i2c: bus 2 rev0.11 at 400 kHz
[ 1.393012] cpu cpu0: Linked as a consumer to regulator.4
[ 1.393120] cpu cpu0: Dropping the link to regulator.4
[ 1.393638] cpu cpu0: Linked as a consumer to regulator.4
[ 1.395679] omap_rtc 44e3e000.rtc: setting system clock to 2000-01-01 00:00:00 UTC (946684800)
[ 1.397143] ALSA device list:
[ 1.397154] No soundcards found.
[ 1.403667] Freeing unused kernel memory: 1024K
[ 1.404552] Run /init as init process
[ 6.888784] EXT4-fs (mmcblk1p1): mounted filesystem with ordered data mode. Opts: (null)
[ 7.518555] systemd[1]: System time before build time, advancing clock.
[ 7.554817] systemd[1]: systemd 241 running in system mode. (+PAM +AUDIT +SELINUX +IMA +APPARMOR +SMACK +SYSVINIT +UTMP +LIBCRYPTSETUP +GCRYPT +GNUTLS +ACL +XZ +LZ4 +SECCOMP +BLKID +ELFUTILS +KMOD -IDN2 +IDN -PCRE2 default-hierarchy=hybrid)
[ 7.555550] systemd[1]: Detected architecture arm.
[ 7.555661] systemd[1]: Running with unpopulated /etc.
[ 7.574133] systemd[1]: Set hostname to .
[ 7.574271] systemd[1]: System cannot boot: Missing /etc/machine-id and /etc is mounted read-only.
[ 7.583554] systemd[1]: Booting up is supported only when:
[ 7.589174] systemd[1]: 1) /etc/machine-id exists and is populated.
[ 7.595517] systemd[1]: 2) /etc/machine-id exists and is empty.
[ 7.601504] systemd[1]: 3) /etc/machine-id is missing and /etc is writable.
[ 9.685055] systemd[1]: Failed to populate /etc with preset unit settings, ignoring: Read-only file system
[ 11.453210] EXT4-fs (mmcblk1p1): re-mounted. Opts: errors=remount-ro
[ 12.097755] systemd-journald[348]: Received request to flush runtime journal from PID 1
[ 16.788482] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6f04000
[ 16.796205] pgd = 1b6254e2
[ 16.798923] [b6f04000] *pgd=9b5c6831, *pte=4a324343, *ppte=4a324833
[ 18.649278] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6f7f000
[ 18.657003] pgd = 136cb15d
[ 18.659721] [b6f7f000] *pgd=9b5ae831, *pte=4a324343, *ppte=4a324833
[ 20.183004] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6f26000
[ 20.190726] pgd = 7dddab55
[ 20.193446] [b6f26000] *pgd=9b437831, *pte=4a324343, *ppte=4a324833
[ 21.771804] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6fc6000
[ 21.779529] pgd = 43e3faa2
[ 21.782249] [b6fc6000] *pgd=9b712831, *pte=4a324343, *ppte=4a324833
[ 23.331468] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6fc5000
[ 23.339191] pgd = 43e3faa2
[ 23.341911] [b6fc5000] *pgd=998e0831, *pte=4a324343, *ppte=4a324833
[ 24.889051] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6feb000
[ 24.896774] pgd = 8ced06c4
[ 24.899494] [b6feb000] *pgd=99831831, *pte=4a324343, *ppte=4a324833
[ 26.478861] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6f56000
[ 26.486586] pgd = 06a22bec
[ 26.489306] [b6f56000] *pgd=9b72c831, *pte=4a324343, *ppte=4a324833
[ 27.947802] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6fd6000
[ 27.955526] pgd = 51106ea4
[ 27.958246] [b6fd6000] *pgd=9b640831, *pte=4a324343, *ppte=4a324833
[ 29.547627] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6f31000
[ 29.555351] pgd = 1e4d9d06
[ 29.558070] [b6f31000] *pgd=9b53e831, *pte=4a324343, *ppte=4a324833
[ 31.190789] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6fa4000
[ 31.198512] pgd = a22c17aa
[ 31.201233] [b6fa4000] *pgd=9ad18831, *pte=4a324343, *ppte=4a324833
[ 31.720054] wlan-en-regulator: disabling
[ 32.665689] Unhandled fault: external abort on non-linefetch (0x1818) at 0xb6fdd000
[ 32.673412] pgd = b273c151
[ 32.676131] [b6fdd000] *pgd=9c4c5831, *pte=4a324343, *ppte=4a324833
[ 35.737683] remoteproc remoteproc0: wkup_m3 is available
[ 36.104583] remoteproc remoteproc0: powering up wkup_m3
[ 36.104673] remoteproc remoteproc0: Booting fw image am335x-pm-firmware.elf, size 217148
[ 36.106281] wkup_m3_ipc 44e11324.wkup_m3_ipc: CM3 Firmware Version = 0x192
[ 36.118339] remoteproc remoteproc0: remote processor wkup_m3 is now up
[ 36.709364] PM: bootloader does not support rtc-only!
[ 47.690997] remoteproc remoteproc1: 4a334000.pru is available
[ 47.712976] pru-rproc 4a334000.pru: PRU rproc node pru@4a334000 probed successfully
[ 47.808040] remoteproc remoteproc2: 4a338000.pru is available
[ 47.823528] pru-rproc 4a338000.pru: PRU rproc node pru@4a338000 probed successfully
[ 54.369841] cfg80211: Loading compiled-in X.509 certificates for regulatory database
[ 54.418756] cfg80211: Loaded X.509 cert ‘sforshee: 00b28ddf47aef9cea7’
[ 57.286834] wlcore: wl18xx HW: 183x or 180x, PG 2.2 (ROM 0x11)
[ 57.425663] wlcore: loaded
[ 58.446583] wlcore: PHY firmware version: Rev 8.2.0.0.243
[ 58.672476] wlcore: firmware booted (Rev 8.9.0.0.83)
[ 58.909617] IPv6: ADDRCONF(NETDEV_UP): wlan0: link is not ready
[ 62.023221] wlan0: authenticate with 12:4a:7d:64:1d:ba
[ 62.075997] wlan0: send auth to 12:4a:7d:64:1d:ba (try 1/3)
[ 62.096097] wlan0: authenticated
[ 62.132546] wlan0: associate with 12:4a:7d:64:1d:ba (try 1/3)
[ 62.135681] wlan0: RX AssocResp from 12:4a:7d:64:1d:ba (capab=0x8531 status=0 aid=2)
[ 62.218649] wlan0: associated
[ 63.267260] cryptd: max_cpu_qlen set to 1000
[ 63.598375] IPv6: ADDRCONF(NETDEV_CHANGE): wlan0: link becomes ready
[ 63.667843] wlcore: Association completed.
[ 110.558761] systemd-journald[348]: File /var/log/journal//system.journal corrupted or uncleanly shut down, renaming and replacing.
[ 112.337718] systemd-journald[348]: Failed to open user journal directory ‘/var/log/journal/494541d841e78dc9ef7bc96365e18432/’: No such file or directory
[ 119.256650] using random self ethernet address
[ 119.256668] using random host ethernet address
[ 119.415592] IPv6: ADDRCONF(NETDEV_UP): SoftAp0: link is not ready
[ 121.550893] using random self ethernet address
[ 121.550912] using random host ethernet address
[ 122.405126] usb0: HOST MAC 50:65:83:e3:67:82
[ 122.417658] usb0: MAC 50:65:83:e3:67:81
[ 122.453409] usb1: HOST MAC 50:65:83:e3:67:84
[ 122.458685] usb1: MAC 50:65:83:e3:67:85
[ 122.959049] configfs-gadget gadget: high-speed config #1: c
[ 131.287546] wlcore: down
[ 131.611535] IPv6: ADDRCONF(NETDEV_CHANGE): SoftAp0: link becomes ready
[ 132.095050] Bluetooth: Core ver 2.22
[ 132.103537] NET: Registered protocol family 31
[ 132.103557] Bluetooth: HCI device and connection manager initialized
[ 132.103588] Bluetooth: HCI socket layer initialized
[ 132.103601] Bluetooth: L2CAP socket layer initialized
[ 132.111732] Bluetooth: SCO socket layer initialized
[ 132.433741] Bluetooth: HCI UART driver ver 2.3
[ 132.433761] Bluetooth: HCI UART protocol H4 registered
[ 132.433768] Bluetooth: HCI UART protocol BCSP registered
[ 132.435136] Bluetooth: HCI UART protocol LL registered
[ 132.435358] Bluetooth: HCI UART protocol ATH3K registered
[ 132.450292] Bluetooth: HCI UART protocol Three-wire (H5) registered
[ 132.457066] Bluetooth: HCI UART protocol Intel registered
[ 132.466794] Bluetooth: HCI UART protocol Broadcom registered
[ 132.469366] Bluetooth: HCI UART protocol QCA registered
[ 132.469378] Bluetooth: HCI UART protocol AG6XX registered
[ 132.470539] Bluetooth: HCI UART protocol Marvell registered
[ 135.749134] Bluetooth: BNEP (Ethernet Emulation) ver 1.3
[ 135.749171] Bluetooth: BNEP filters: protocol multicast
[ 135.749200] Bluetooth: BNEP socket layer initialized
[ 246.355832] hrtimer: interrupt took 36041 ns
[ 290.878338] remoteproc remoteproc1: powering up 4a334000.pru
[ 290.891849] remoteproc remoteproc1: Booting fw image am335x-pru0-fw, size 32456
[ 290.891917] remoteproc remoteproc1: remote processor 4a334000.pru is now up
Hi @JCM2701
2 things, have you had connected a rc input in the beagle ?
99% of the problems with beagle is related to the pru, could you please share the uEnv.txt file ?
i tried to control servo using librobotcontrol library it worked, servo connected to channel one rotate, (rc_test-servos -c 1 -s 1.5) , the problem am i encountering is how i can set configuration to the mission planner and out being observed the servos connected to the bbblue
You must set the servo output tab in mission planner to a function - If you put one servo as elevator and you pitch your beagle, the servo must move, if is in fbwa or any automatic flight mode.
Or use a rc input to do that or even connect a joystick in your computer and enable this joystick in mission planner to try to control the aircraft.
Another alternative is use qgroundcontrol with the virtual joystick enabled - with that you will have a way to control too.

i have tried several times to set it, but nothing happens i dont know whats the problem with my beagle
Ok,
first, how are you powering the servo rail?
Second, have you compiled the example I told you in the aiopru folder ?
Have you have connected a receiver in the rcin and it’s working?
99% of the problems with beagles is related to the PRU and you can check that compiling and running the test.
am i using an adapter to power beagle that supplies around 12V to the board…
i have managed to clone (GitHub - beagleboard/am335x_pru_package) but and dont know what to compile exactly😥…
i have tested to command servos using command (rc_test_servos -c 1 -s 1.5 ) servo connected to channel 1 moves is this means Pru are fine??
i dont have Lipo battery to power my beagle once i was using usb cable, but currently am i using power adapter
debian@beaglebone:~$ sudo rc_test_servos -c 1 -s 1.5
Turning On 6V Servo Power Rail
Sending only to channel 1.
Sweeping servos back/forth between ±1.500000
Pulse Frequency: 50