Hi,
i dont know why i cant compile the Arduplane from Ardupilot! In the past they use a part of the Arduino. Now?
The info with “Visual Studio” or “Atmel Studio 6.2” dont work!
thanks
Alex
Hi,
i dont know why i cant compile the Arduplane from Ardupilot! In the past they use a part of the Arduino. Now?
The info with “Visual Studio” or “Atmel Studio 6.2” dont work!
thanks
Alex
AVR platforms are no longer for plane. The Atmel Studio instructions won’t work for building a current version of Plane. Try these instructions: http://ardupilot.org/dev/docs/building-px4-with-make.html#building-px4-with-make @rmackay9 might be able to point you at a way to get an IDE to work on Windows, but I’m not familiar with getting that aspect to work.
in the moment, i fly with apm2.6 and with ArduPlane 3.0.3!
If i download 3.0.3 from GIT, i cant compile.
Any ideas?
I would like to save the posibility to make my own firmware for my plane
I’m not sure sorry. I only compiled code for the AVR based stuff once, and did it from a linux box several years ago.
Hi,
i found a solution!
The ArduPlane Arduino IDE cant handle long Directory-names. I shortet the name like “ARduPilot303”, set the Sketch-Path, close Arduino-IDE, reopen and then i can compile!
I test this on different PCs, every time the same. Interesting!
Alex
Having compilation issues too. Trying to re-compile Arduplane 3.7.1 (for testing purposes before I do this with my changes), via Arduino IDE too (Following http://ardupilot.org/dev/docs/building-ardupilot-with-arduino-windows.html), but at “Connect your APM to your USB” getting stuck at the point where to selecting the sketchbook with my firmware (see circled what I get istead of Arducopter, Arduplane etc…): 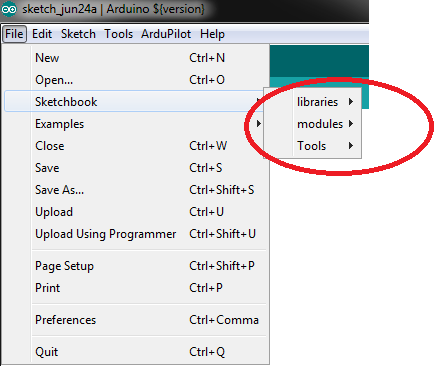
Do you have an idea why I do not see what is shown in the linked docu ? FYI -cloning and initializing the Source code via Git bash went pretty much as per docu (no error msgs),
Here is a log to both command executions:
ih@projects MINGW64 /c/GIT
$ git clone git://github.com/ArduPilot/ardupilot.git
Cloning into ‘ardupilot’…
remote: Counting objects: 190323, done.
remote: Compressing objects: 100% (7/7), done.
remote: Total 190323 (delta 2), reused 0 (delta 0), pack-reused 190316
Receiving objects: 100% (190323/190323), 87.27 MiB | 5.72 MiB/s, done.
Resolving deltas: 100% (138359/138359), done.
ih@projects MINGW64 /c/GIT
$ cd ardupilot
ih@projects MINGW64 /c/GIT/ardupilot (master)
$ git submodule update --init --recursive
Submodule ‘modules/PX4Firmware’ (git://github.com/ArduPilot/PX4Firmware.git) reg istered for
path 'modules/PX4Firmware’
Submodule ‘modules/PX4NuttX’ (git://github.com/ArduPilot/PX4NuttX.git) registere d for path
'modules/PX4NuttX’
Submodule ‘modules/gbenchmark’ (git://github.com/google/benchmark.git) registere d for path
'modules/gbenchmark’
Submodule ‘gtest’ (git://github.com/ArduPilot/googletest) registered for path 'm odules/gtest’
Submodule ‘modules/mavlink’ (git://github.com/ArduPilot/mavlink) registered for path
'modules/mavlink’
Submodule ‘modules/uavcan’ (git://github.com/ArduPilot/uavcan.git) registered fo r path
'modules/uavcan’
Submodule ‘modules/waf’ (git://github.com/ArduPilot/waf.git) registered for path
'modules/waf’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4NuttX’…
Cloning into ‘C:/GIT/ardupilot/modules/gbenchmark’…
Cloning into ‘C:/GIT/ardupilot/modules/gtest’…
Cloning into ‘C:/GIT/ardupilot/modules/mavlink’…
Cloning into ‘C:/GIT/ardupilot/modules/uavcan’…
Cloning into ‘C:/GIT/ardupilot/modules/waf’…
Submodule path ‘modules/PX4Firmware’: checked out 'a6205e6ec8767024e1c47128641b60ef841972ce’
Submodule ‘Tools/gencpp’ (https://github.com/ros/gencpp.git) registered for path 'modules/PX4Firmware/Tools/gencpp’
Submodule ‘Tools/genmsg’ (https://github.com/ros/genmsg.git) registered for path 'modules/PX4Firmware/Tools/genmsg’
Submodule ‘mavlink/include/mavlink/v1.0’ (git://github.com/mavlink/c_library.git) registered for path 'modules/PX4Firmware/mavlink/include/mavlink/v1.0’
Submodule ‘src/lib/DriverFramework’ (https://github.com/PX4/DriverFramework.git) registered for path 'modules/PX4Firmware/src/lib/DriverFramework’
Submodule ‘src/lib/ecl’ (https://github.com/PX4/ecl.git) registered for path 'modules/PX4Firmware/src/lib/ecl’
Submodule ‘src/lib/matrix’ (https://github.com/PX4/Matrix.git) registered for path 'modules/PX4Firmware/src/lib/matrix’
Submodule ‘src/modules/uavcan/libuavcan’ (git://github.com/UAVCAN/libuavcan.git) registered for path 'modules/PX4Firmware/src/modules/uavcan/libuavcan’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/Tools/gencpp’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/Tools/genmsg’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/mavlink/include/mavlink/v1.0’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/DriverFramework’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/ecl’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/matrix’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/modules/uavcan/libuavcan’…
Submodule path ‘modules/PX4Firmware/Tools/gencpp’: checked out '26a86f04bcec0018af6652b3ddd3f680e6e3fa2a’
Submodule path ‘modules/PX4Firmware/Tools/genmsg’: checked out '72f0383f0e6a489214c51802ae12d6e271b1e454’
Submodule path ‘modules/PX4Firmware/mavlink/include/mavlink/v1.0’: checked out 'bf251caef3dbf610e5152115a2d81e00e54ab7e7’
Submodule path ‘modules/PX4Firmware/src/lib/DriverFramework’: checked out 'd6ef668f4564e1c158910c52df7d71114bd2ca4e’
Submodule ‘cmake_hexagon’ (https://github.com/ATLFlight/cmake_hexagon.git) registered for path 'modules/PX4Firmware/src/lib/DriverFramework/cmake/cmake_hexagon’
Submodule ‘dspal’ (https://github.com/PX4/dspal) registered for path 'modules/PX4Firmware/src/lib/DriverFramework/dspal’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/DriverFramework/cmake/cmake_hexagon’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/DriverFramework/dspal’…
Submodule path ‘modules/PX4Firmware/src/lib/DriverFramework/cmake/cmake_hexagon’: checked out 'ba681fcd0d4c5ac95636dd8e9d8536dbd81beabd’
Submodule path ‘modules/PX4Firmware/src/lib/DriverFramework/dspal’: checked out '8f39699c6b79447f32f0714629da790bbf271aa5’
Submodule ‘test/dspal_tester/cmake_hexagon’ (https://github.com/ATLFlight/cmake_hexagon.git) registered for path 'modules/PX4Firmware/src/lib/DriverFramework/dspal/test/dspal_tester/cmake_hexagon’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/DriverFramework/dspal/test/dspal_tester/cmake_hexagon’…
Submodule path ‘modules/PX4Firmware/src/lib/DriverFramework/dspal/test/dspal_tester/cmake_hexagon’: checked out 'ba681fcd0d4c5ac95636dd8e9d8536dbd81beabd’
Submodule path ‘modules/PX4Firmware/src/lib/ecl’: checked out 'f86ef3478219b4b1c31e17b8f308df4b69eda2f7’
Submodule ‘matrix’ (https://github.com/PX4/Matrix) registered for path 'modules/PX4Firmware/src/lib/ecl/matrix’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/lib/ecl/matrix’…
Submodule path ‘modules/PX4Firmware/src/lib/ecl/matrix’: checked out '95e3d7d6ce5274d9b7fec76c0093dc5eaa381abf’
Submodule path ‘modules/PX4Firmware/src/lib/matrix’: checked out '07fba8322a16cb2dac47e6a8ac7d21ec346313ff’
Submodule path ‘modules/PX4Firmware/src/modules/uavcan/libuavcan’: checked out '702f6f05608885d3be993edb01394212bd2dade1’
Submodule ‘dsdl’ (https://github.com/UAVCAN/dsdl) registered for path 'modules/PX4Firmware/src/modules/uavcan/libuavcan/dsdl’
Submodule ‘libuavcan/dsdl_compiler/pyuavcan’ (https://github.com/UAVCAN/pyuavcan) registered for path 'modules/PX4Firmware/src/modules/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/modules/uavcan/libuavcan/dsdl’…
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/modules/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan’…
Submodule path ‘modules/PX4Firmware/src/modules/uavcan/libuavcan/dsdl’: checked out '9804a3e6972825586be252ce08dd899f44994b14’
Submodule path ‘modules/PX4Firmware/src/modules/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan’: checked out 'c58477a644d20ccf95a20c151f3a0402f271c3b8’
Submodule ‘dsdl’ (https://github.com/UAVCAN/dsdl) registered for path 'modules/PX4Firmware/src/modules/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl’
Cloning into ‘C:/GIT/ardupilot/modules/PX4Firmware/src/modules/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl’…
Submodule path ‘modules/PX4Firmware/src/modules/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl’: checked out 'fd12483ddd4e58242d61d74a163e7aeaa1e0f466’
Submodule path ‘modules/PX4NuttX’: checked out '1a99ba5832d7ad815df6ed847e052c12 8644c8f7’
Submodule path ‘modules/gbenchmark’: checked out '006d23ccca1375a973b7fae0cc351c edb41b812a’
Submodule path ‘modules/gtest’: checked out 'c99458533a9b4c743ed51537e25989ea559 44908’
Submodule path ‘modules/mavlink’: checked out '466e69b55eeddc9bf2253865bd24fe9b3 6af9f9f’
Submodule ‘pymavlink’ (git://github.com/ArduPilot/pymavlink.git) registered for path
'modules/mavlink/pymavlink’
Cloning into ‘C:/GIT/ardupilot/modules/mavlink/pymavlink’…
Submodule path ‘modules/mavlink/pymavlink’: checked out '7f4b41a860b62dfdace37bac4ea3debd48f30a66’
Submodule path ‘modules/uavcan’: checked out '71cf39c8c6c3c2709bc1a32ffd947add22b1a836’
Submodule ‘dsdl’ (https://github.com/UAVCAN/dsdl) registered for path 'modules/uavcan/dsdl’
Submodule ‘libuavcan/dsdl_compiler/pyuavcan’ (https://github.com/UAVCAN/pyuavcan) registered for path 'modules/uavcan/libuavcan/dsdl_compiler/pyuavcan’
Cloning into ‘C:/GIT/ardupilot/modules/uavcan/dsdl’…
Cloning into ‘C:/GIT/ardupilot/modules/uavcan/libuavcan/dsdl_compiler/pyuavcan’…
Submodule path ‘modules/uavcan/dsdl’: checked out '9804a3e6972825586be252ce08dd899f44994b14’
Submodule path ‘modules/uavcan/libuavcan/dsdl_compiler/pyuavcan’: checked out 'c58477a644d20ccf95a20c151f3a0402f271c3b8’
Submodule ‘dsdl’ (https://github.com/UAVCAN/dsdl) registered for path 'modules/uavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl’
Cloning into ‘C:/GIT/ardupilot/modules/uavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl’…
Submodule path ‘modules/uavcan/libuavcan/dsdl_compiler/pyuavcan/dsdl’: checked out 'fd12483ddd4e58242d61d74a163e7aeaa1e0f466’
Submodule path ‘modules/waf’: checked out ‘73163ef5c117a51f29546d17c2bb2041aecefcdd’
ih@projects MINGW64 /c/GIT/ardupilot (master)
$
AFAIK the Arduino IDE is totally unsupported, and has been since we dropped support for APM based boards. I’d recommend you look into either building it with either make directly, or their are instructions for using the Eclipse IDE http://ardupilot.org/dev/docs/editing-the-code-with-eclipse.html
Thanks for the note. Yes, I already figured the Arduino IDE being useless here. Make worked indeed fine.