Hello
I was working on RTK GPS HERE+ for a while to get a steady altitude. I realize that Here+ GPS shift between RTK FLOAT and RTK_FIX occasionally. As a result, My drone height deviates from its initial height. Though, I found that the RTK fix gives closer and steady accuracy in terms of height during flight time. But, My intention is to make RTK GPS work in RTK FLOAT as my objective is steady altitude. I even found that RTK-Here+ is not reliable to get RTK FIX in whole flight time.
So, Is it possible to set some configuration from Here+GPS hardware to make it work only in RTK FlOAT?
Stop sending RTK corrections, it will be stuck at float. But of course the position accuracy in the vertical will be really bad.
BTW the vertical precision is typically three times worse than the horizontal precision.
IMHO only RTK FLOAT is a bad idea.
Try fixing your system to get consistent RTK FIX.
I am too interested in preventing a Fixed RTK solution. For our application float is good enough and when it changes between fixed and float it causes the aircraft to jump around by a few meters. Even with an F9P, the areas we fly do not allow us to hold a fixed solution.
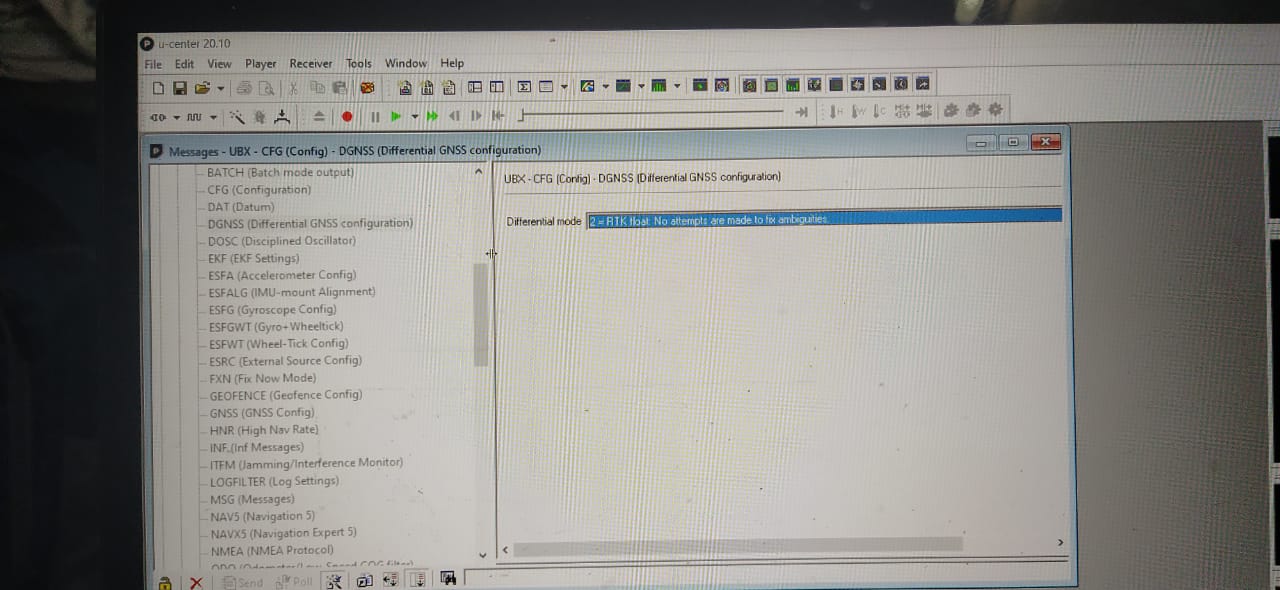
Try to test with this configuration for both base station and your copter GPS, I have HERE+ RTK GPS and by looking at different posts about HERE+ GPS getting a RTK fix consistently seems not possible or very difficult, and I am also facing same issues with the switching between float and fix
I’ve just been testing RTK - using a Here3 on my copter. I get 0.5 meter accuracy on survey-in - but the copter never changes from “float”. I found this post just now - after googling the topic.
I’m using the new “mast” for the Here3 - on a 450 class quad - not too many options to get it further from the electronics.
Since CubePilot doesn’t have the Here3-Pro available yet, I’ve considered getting the Holybro F9P receiver. But I’d appreciate any other suggestions you might have.
One more thing - how does ArduPilot “copter” use the GPS altitude? I would think that barometric altitude would be used for navigation.