There is no problem with the flight of the drone, but I want to reduce my servo motor speeds. How can I do that. Do I need to adjust PWM or I just want to slow down my engine speeds without needing these. How can I slow it down or increase it?
Can you help urgently?
Perhaps I’m missing something here, but you can’t slow down the motors without reducing the lift being produced. So if you say the drone is flying well, slowing down the motors will change that negatively.
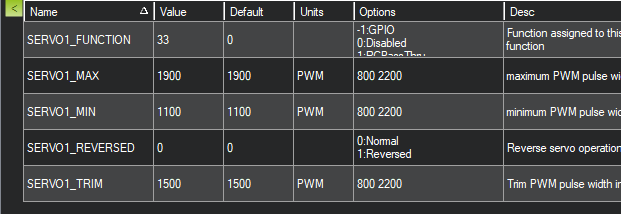
If you mean on the ground, or the min values then you can adjust MOT_SPIN_MIN and MOT_SPIN_ARM. You shouldn’t need to adjust the PWM values.
Mot spin arm 0.08
Max 0.95
I set the min to 0.11. There is no problem at the beginning. I adjusted the deadzone part of the ESCs and tested the motors. I just want to slow down the speed of the engines. PID values are adjusted automatically and if I change them, I could probably damage the drone.
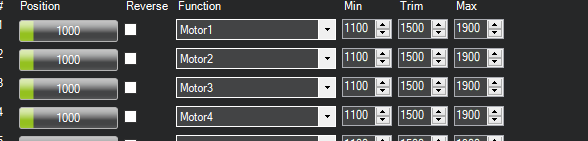
What else can I do to slow down the speed of the motor1,2,3,4 values in the servo_output parameter? These parameters are valid for a Quadcopter
Are you installing different props?
Why are you trying to slow down the motors? There may be a different solution to a problem.
I built a vehicle that can travel both in the air and on land. So I want to control the engine speeds. I use Pixhawk for flying and Arduino for land driving. I can drive in both. I can reduce the driving speed of the servos via Arduino. I want to implement the same on Pixhawk1. But I couldn’t get around to adjusting the driving speed.
I tried to use a switch on the Flysky remote as a potentiometer. But the value coming from the receiver and the potentiometer. I was not successful due to the PWM/analogue value reading problem.
If you are using the same motor for flight and for movement on the ground, that might require more control than you’ll get from a pixhawk 1. That’s a specific use case and I don’t think the normal firmware will do that. Perhaps a H7 based controller and a lua script could do it, but that’s out of my reach.
If you are using a different motor for land driving then you could connect it via the RC Passthrough function. Then you would have direct control from your radio of the drive motor and it will output the PWM value for the motor.
I use two different engines for driving on land and in the air. Thank you very much for your support, I have connected it to RC. I will try by changing the PWM values. Have a nice day!