I finally got my build to point of doing an autotune, seemed to go well enough but had periods of wind and had to readjust for drift. Seemed to fly okay afterwards though not near as locked in as I would have hoped, almost seemed a bit laggy.
When I got home and checked it had set these extremely high (outside of listed range):
ATC_ANG_PIT_P 33.00615
ATC_ANG_RLL_P 33.00615
Unfortunately I haven’t had a windless day around here in months and now we have rain in the forecast for next few days so this was my last chance to try the Autotune.
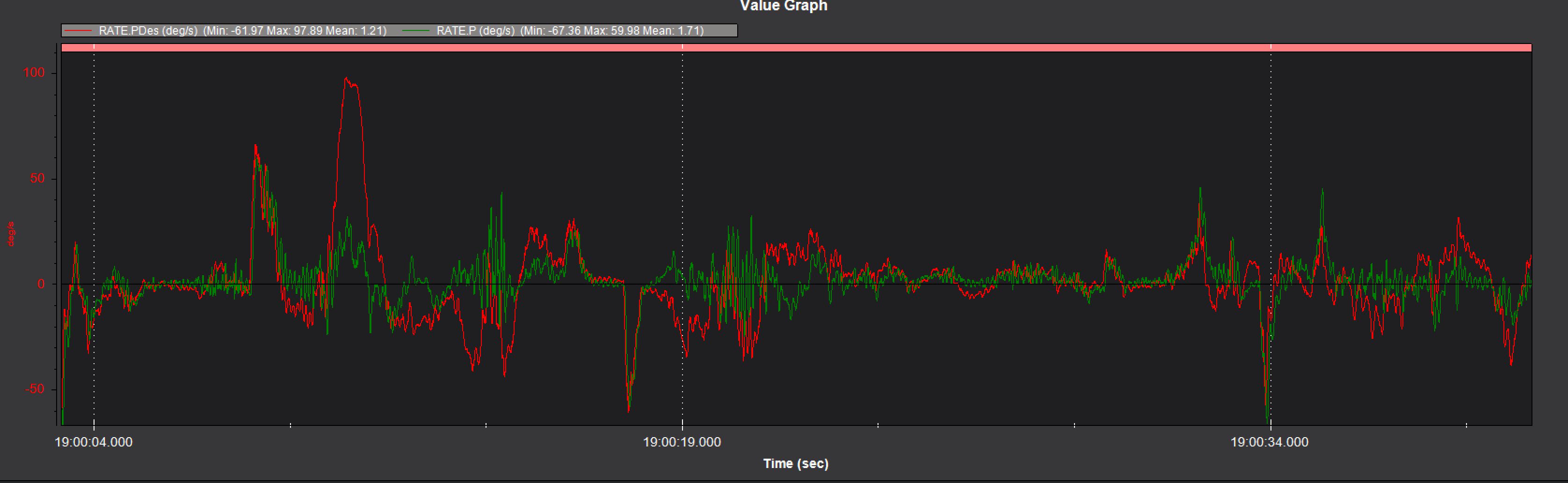
I would appreciate any help and feedback here! Autotune and post-tune flight logs below. Thank you!
While I wouldn’t necessarily worry about any parameter outside of MP “suggested” ranges these values and the Angle values you mention are not right for a 7" on 4S:
ATC_ACCEL_P_MAX,300101.8
ATC_ACCEL_R_MAX,282975.1
Roll isn’t as bad but still some oscillation probably because the Roll Rate P&I is lower and in the ballpark for this kit of parts.
Not sure if it was because of the wind but it’s usually pointless to Auto Tune with any wind. I would set these back to Initial Parameter Tune values:
ATC_ACCEL_P_MAX
ATC_ACCEL_R_MAX
These maybe to 18
ATC_ANG_PIT_P
ATC_ANG_RLL_P
And set Pitch Rate P&I’s equal to Roll and give that a try.
Note: I would use X for that Frame not V. I have and have had other “deadcat” style frames and X has always performed better. In fact my iFlight Chimera 7" is not so much different than your craft other than it’s on 6S.
Wellll shoot. Thank you very much for all that. It was about 7mph winds today and was hoping that wouldn’t be too terrible, but we’ve had a bad summer for wind. I figured it would be worth a shot.
I will set these:
ATC_ACCEL_P_MAX,146100
ATC_ACCEL_R_MAX,146100
and
ATC_ANG_PIT_P,18
ATC_ANG_RLL_P,18
and adjust the Pitch Rate P&I all per your advice and go from there.
I will also change the frame type, I wasn’t sure if that would make much difference.
At this point would it be worth trying another Autotune if I do happen on a perfectly calm day?
One other question, are you running ExpressLRS? I feel like mine is being glitchy with the telemetry and I’ve seen mention of having to move to a different UART with DMA.
Great thanks Dave, I think I will try that. Mine defaulted to Serial1 being Mavlink2 (also Serial2 is Mavlink2), do I need to worry about that? And actually would you be willing to share your .PARAM? I would help me a lot to compare to a known working config just to see how other things are used. Cheers!
Hi Bryan,
No worry about changing the Serial1 to 23 for RCin. Your best reference for your quad would be Andy’s 7" LR build series which includes a parameter file. Mine is essentially a copy of that. The difference will be your 4S power vs 6S for that one and mine. It’s possible Auto Tune will raise ATC_ACCEL_P/R max values from the initial values close to where you were, that’s probably OK. The Angle Pitch/Roll P term though is higher than I have ever seen it. I wonder if it’s because of the V-frame config.
Hey Dave, perfect on Serial1, I’ll be moving that here shortly. I had actually been running through Andy’s build but never went back to review his param- thanks for the direction!
I’m wondering if you think any of these differences could be causing the issues here:
His EK3_IMU_MASK,2 vs my EK3_IMU_MASK,3
His EK3_PRIMARY,1 vs my EK3_PRIMARY,0
His FFT_ENABLE,1 (and associated params) vs my FFT_ENABLE,0
His INS_NOTCH_ENABLE,1 (and associated params) vs my INS_NOTCH_ENABLE,0
And finally I noticed I have RPM1_TYPE,0 and RPM2_TYPE,0, I’m guessing this is okay because I’m using bdshot?
I’ll give my answers as I did things a bit different.
1&2. Andy did not like the noise of the default IMU so he disabled it and enabled the 2nd one. I figured I would start with both enabled and if I had issues I would do the same. I was happy enough with the primary IMU and both active so never changed it.
You only need FFT enabled if you are using it to drive the Dynamic Notch Filter. You will note that he has 2 notches. A ESC RPM driven one and a static notch, neither of which is using FFT. I believe he was using the FFT as a tool during tuning. You don’t need it.
You may or may not need a 2nd notch. Your frame is different so I would suspect not. I see you have one configured so I suppose you have gone thru the configuration. Actually that parameter has been replaced with the INS_HNTCH2_ENABLE parameter.
Thank you for the explanation on all that, that makes sense now.
Yes I had done that before and ran through it again after rebuilding, the base frequency changed slightly but setting that took care of it and the 2nd harmonic, so sounds like I won’t need to mess with the other notch filters.
I just got all the changes made and will be reassembling and hopefully able to go for a quick test tomorrow. Sorry for throwing all this stuff out at once, frantically trying to get ready for some hopefully decent flying days this weekend! I appreciate you Dave!