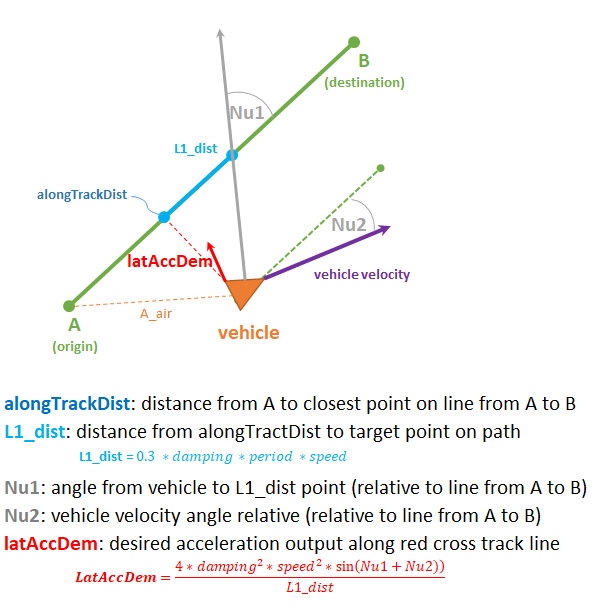
Hello everyone, I have a question about the L1 navigation algorithm. I’ve consulted the paper at https://doi.org/10.2514/6.2004-4900, but when comparing the source code and some information on the guidance page at https://ardupilot.org/dev/_images/rover-L1.png, I don’t understand why there are formulas for calculating L1_dist and latAccDem like that.
{kind=link}