How does target or desired airspeed work for TECS?
I understand that normally one should have a trim airspeed between minimun and maximum fbw airspeeds.
However, in a situations have observed that when my minimum airspeed (18m/s) is equal to cruise airspeed (also 18 m/s), the desired airspeed in logs is shown to be roughly 1m/s higher than minimum airspeed during RTL mode (19.04 m/s). But when I go into auto mode and my mission is planned at a speed lower than minimum airspeed (say 16 m/s), the target airspeed does not go back to fbw minimum airspeed upon rtl after completion of mission (stays hovering around 16 m/s).
I know it shouldn’t have been configured like that but it happened by mistake and fortunately i didnt crash. But I observed this phenomenon in the said flights’ log.
In case log is required, i will happily oblige.
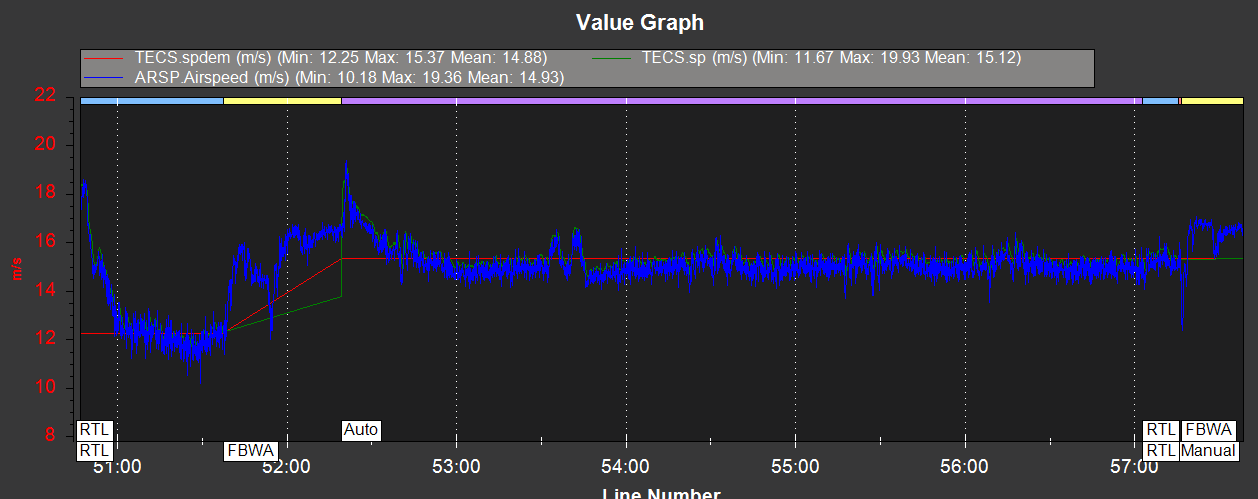
From what I have observed in the above image when airspeed trim is at 12 m/s and mode is changed to auto, and mission speed is set at 16 m/s, the change is visible. However, after completion of the mission, in RTL mode, the desired airspeed does not go back to 12 m/s. is it supposed to be set manually during mission planning?
Similarly, in this flight, when trim airspeed is set at 18 and mission is at 16, the target airspeed does not come back to airspeed trim, i-e, 18 m/s. Furthermore, in the RTL after auto mission, two spikes in desired airspeed can be observed. They are probably due to groundspeed, right? I had set groundspeed min at 8m/s and I have observed GPS groundspeed in 7’s at those spots.
an RTL at the end of a mission is still part of the mission…not until you mode change out of RTL does the mission end…
I am not certain, but Airspeed sensor reports airspeed, not TrueAirSpeed which I think TECs computes and uses, as I recall…there will be a small difference depending on static pressure and temp (Pressure Altitude makes measured airspeed and true airspeed different)
The second case was not at the end of the mission. The mission was interrupted by switching back into RTL mode.
I do understand the difference between reported and computed airspeed. I was wondering why the target airspeed does not go back to the arspd_trim value upon mode switch to RTL. See, in the second case, the target airspeed stayed at 16m/s even in RTL mode. This is what I was concerned about.
Thanks for the reply, Peter. But I am still confused. Throttle nudge llinearly scales the desired airspeed in altitude hold modes. However, before the auto missions, when in RTL mode, the desired/demanded airspeed is at the trim airspeed cm. Even with the throttle at the same position.
I certainly cant explain it…throttle nudge should have only varied the target -10% (1400pwm vs 1500pwm)…it appears that once a set speed in a mission is executed, it hangs around for other throttle controlled modes…may be an actual bug…the RTL after the AUTO should have returned to a TECs demanded speed of 18m/s…instead it hangs at the forced mission speed of 16m/s…we should be able to repeat this in SITL
I can duplicate it in SITL…the throttle nudge only works from the TRIM aspeed (or revised trim aspeed if set with a do cmd) to arspd_max beginning at mid throttle up…just like it does in CRUISE mode without an airspeed sensor from trim_throttle up to thr_max…fstarting at mid stick
if the speed is change in the AUTO mission, then it becomes the new trim speed for RTL if it happens without going thru FBWB or CRUISE…FBWB and CRUISE behave normally with arspd_min at low stick and _max at high stick…and TRIM_ARSPD is reinstated for RTLs after that…
will mention this to the plane lead…not sure it a big deal, but needs to documented at the least for the do_change_speed command…