hello!
Based on Ardurover firmware,
I am building and testing a USV myself.
Due to funding issues, USVs are being manufactured using cheap parts.
Due to the need for underwater sonar sensors,
I purchased a UART-based sonar sensor from AliExpress and am trying to connect it, but it doesn’t work as I want.
It would be great if you could share the method.
I would like to measure the water depth using the sensor I purchased and check it in GCS.
If this sensor is compatible, you will be able to test the sonar function for a small amount of money in the future.
What direction should we move forward?
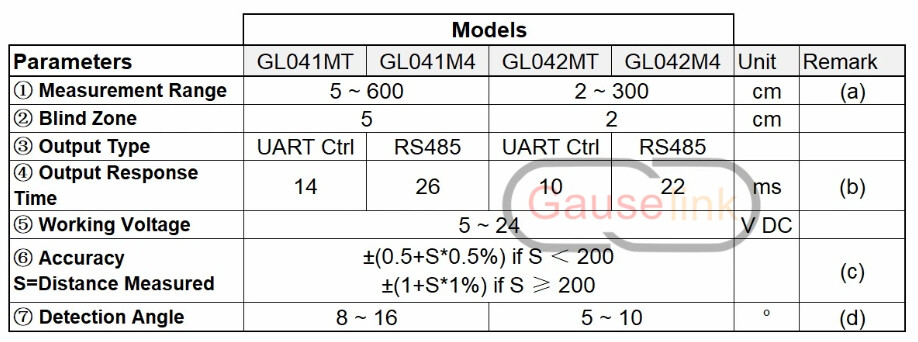
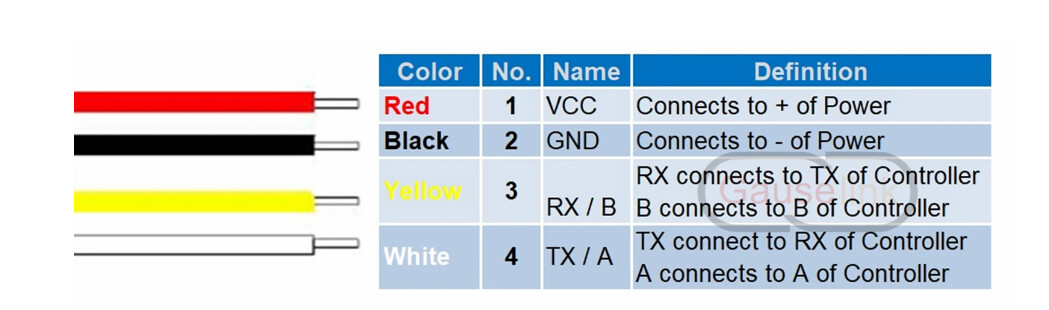
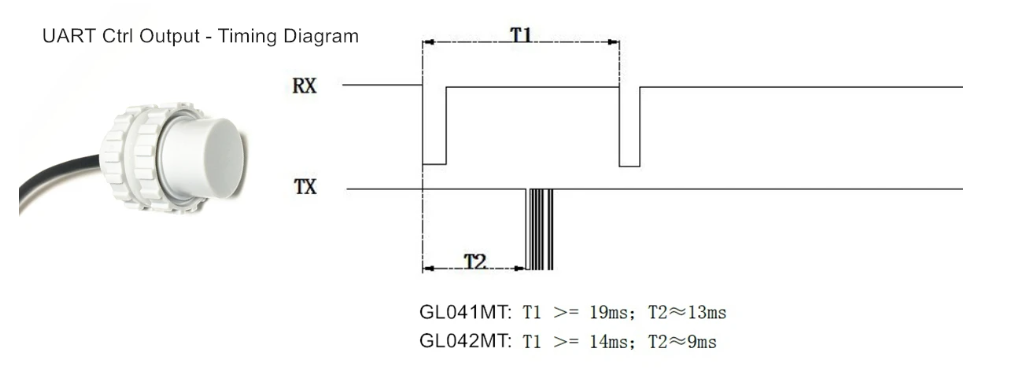
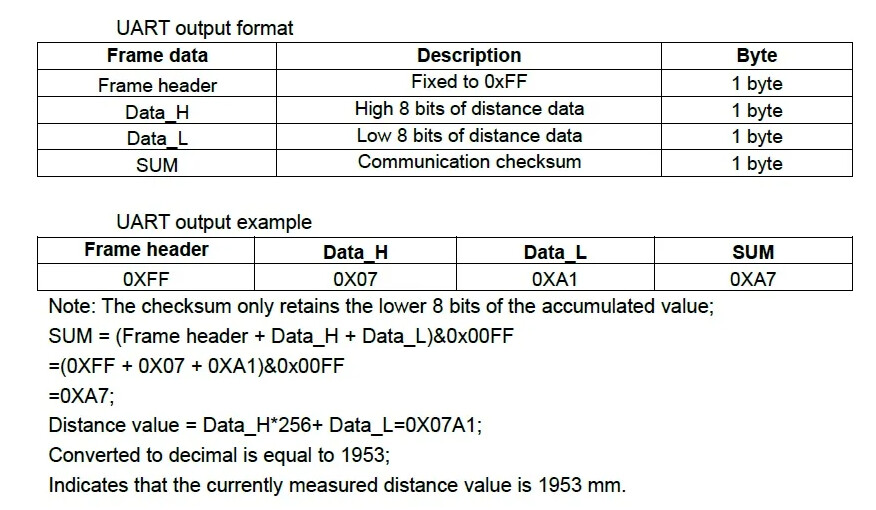
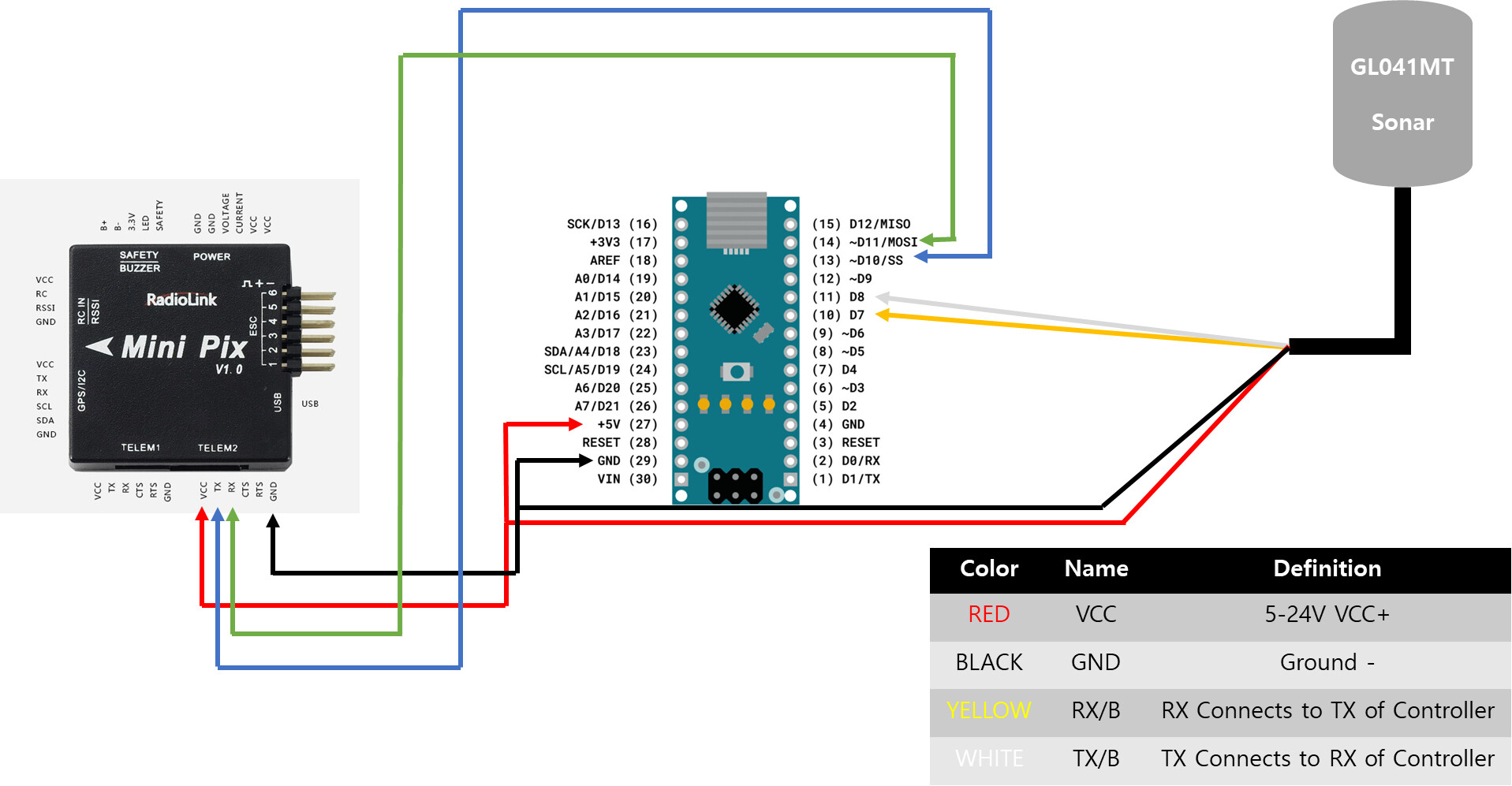
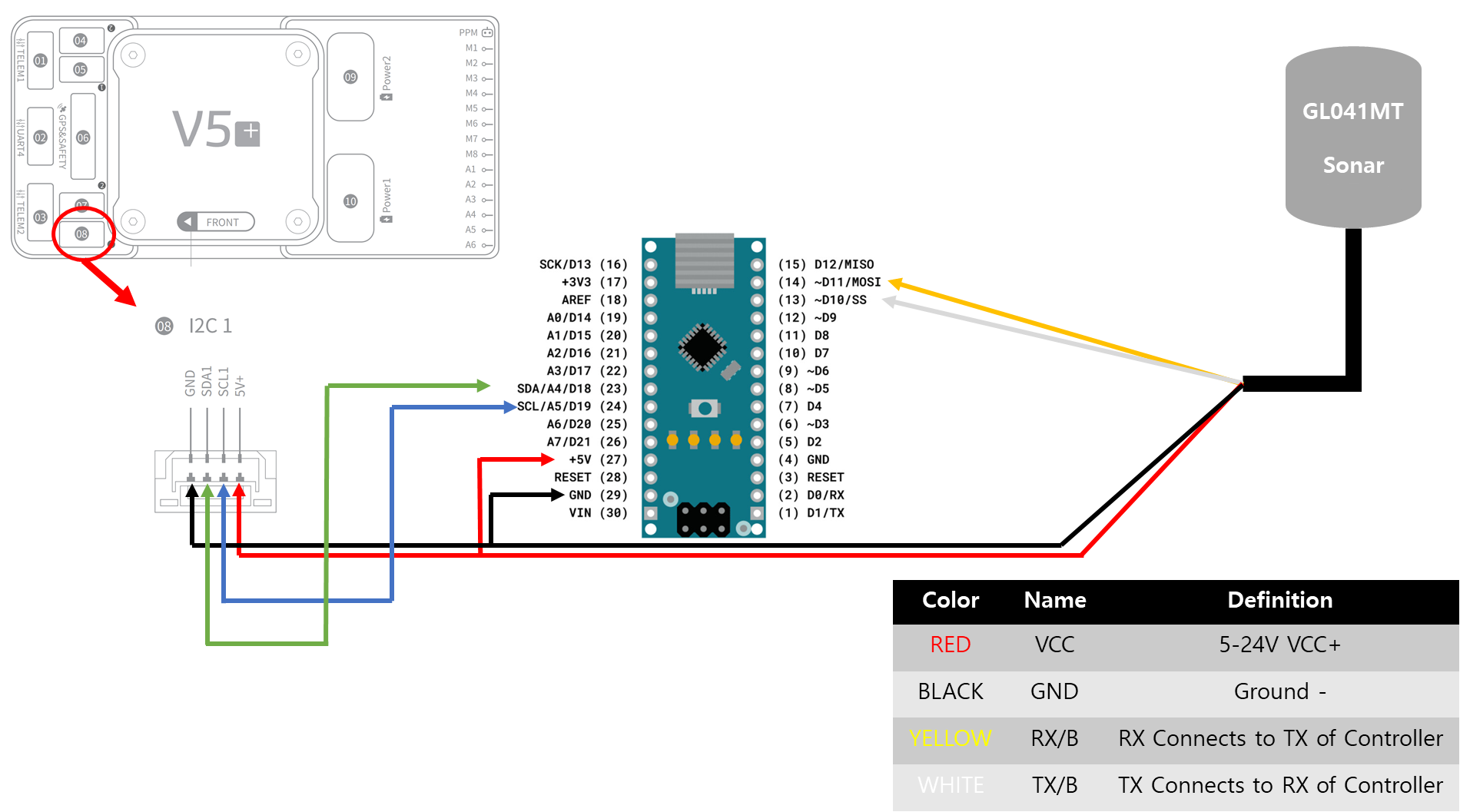
Below is information on the sonar sensor I purchased.
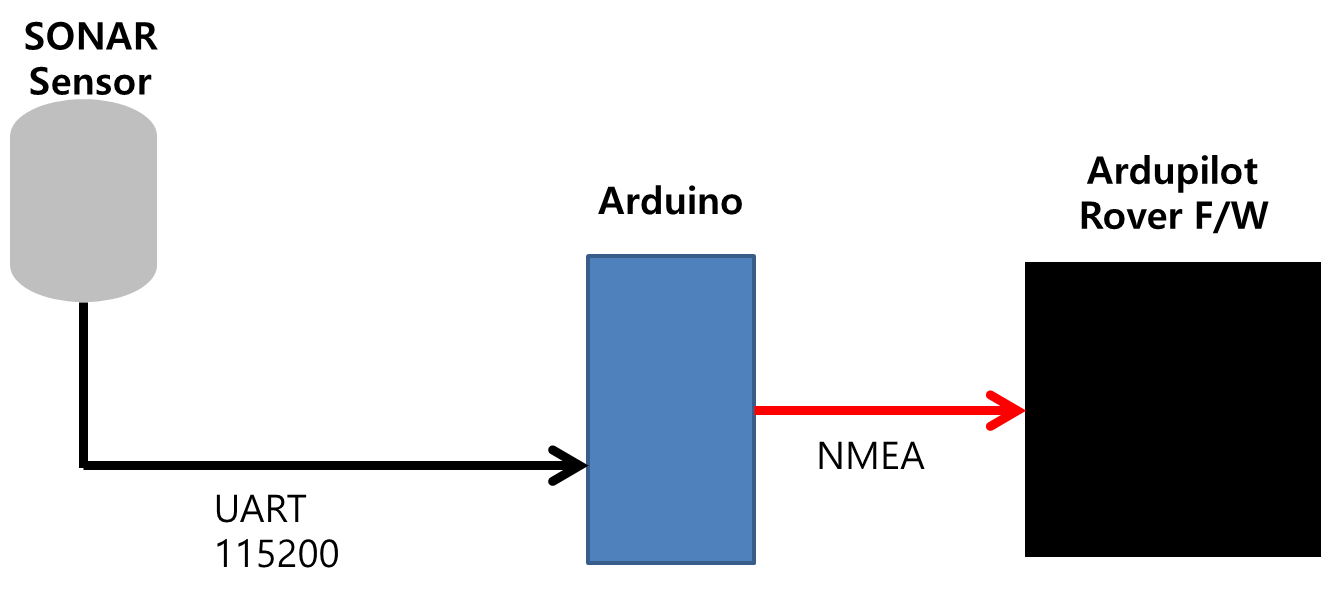
First, let’s transmit using the NMEA protocol using Arduino.
Chet, I’m going to try using GPT.
Because I am an ordinary person without basic knowledge.
I have already done it, I already have a i2c sonar adapter, it just needed the checksum modified as the protocol is basically the same between the GL042MT and SR04T. I haven’t got a sonar to test it with.