I am using these motors T-MOTOR MN4014 400KV and I also use these propellers T-MOTOR Carbon Prop - P17x5.8, with these propellers, everything was working fine. I then installed the NS17x5.8 Prop, generator 3 ultra light props and I have hot motors in 5 minutes hovering flight. Do you have any suggestions? I am using pixhawk orange cube for flight controller and I have ardupilot, I have tuned the flight controller good, I have put soft mount on the motors, I checked the logs and I do not have a lot vibrations. I also check the levelling of the motors and they are good. All the motors are hot. I am sending also the log of the flight: https://drive.google.com/file/d/1z74ROFbj5exvZlZmnCVnHq11-lXxEp-c/view?usp=sharing
Can you help me?
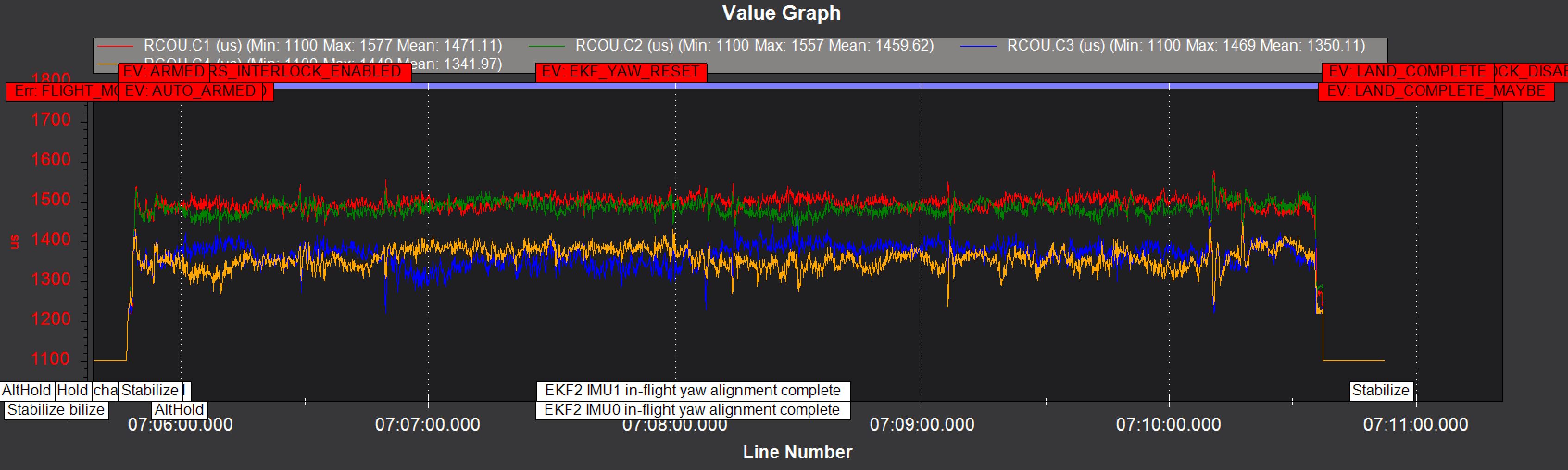
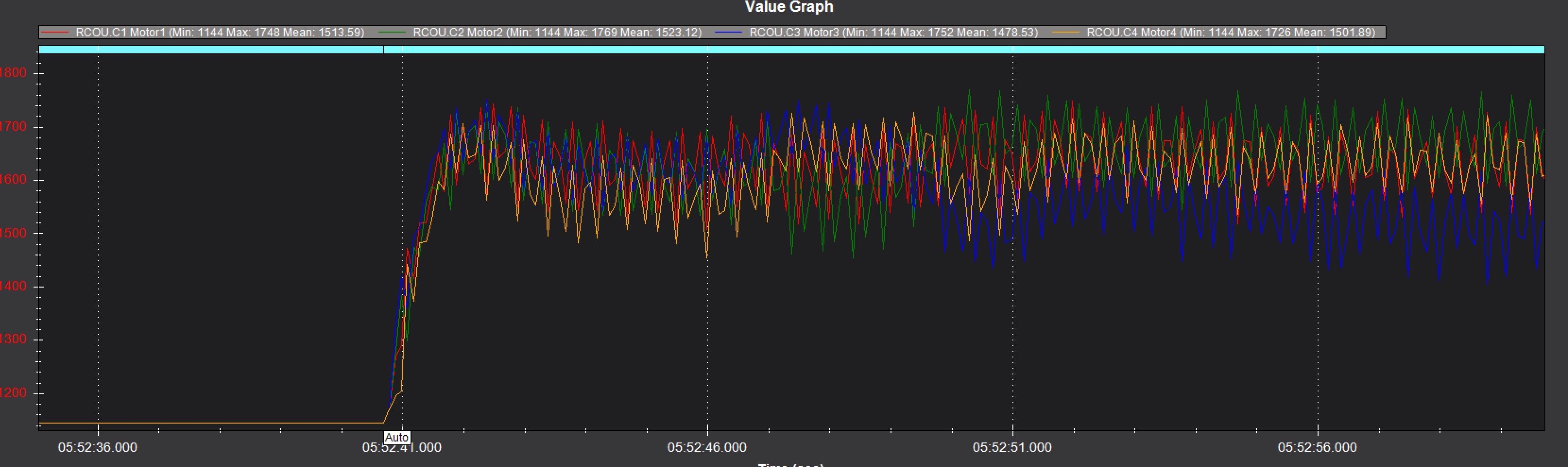
I see you have completed all the Initial Tuning parameters so that’s good. Vibes are low as you say. It does look like it needs further tuning. The major problem, which we seem to see posted everyday here on the forum, is a mechanical yaw bias. The CCW motors are commanded much higher than the CW motors. I’m not sure if this is the cause of hot motors but it needs to be addressed. Twisted arms, twisted motor mounts, frame distortion or difference in props typically explain this.
You probably won’t have to look any further than that motor angle issue Dave posted, that’s a pretty big imbalance. But in case it doesn’t fix it, some ESCs have different timing modes that can affect heat. Like the xrotor40a have intermediate and high timings, and this little blurb in the manual.
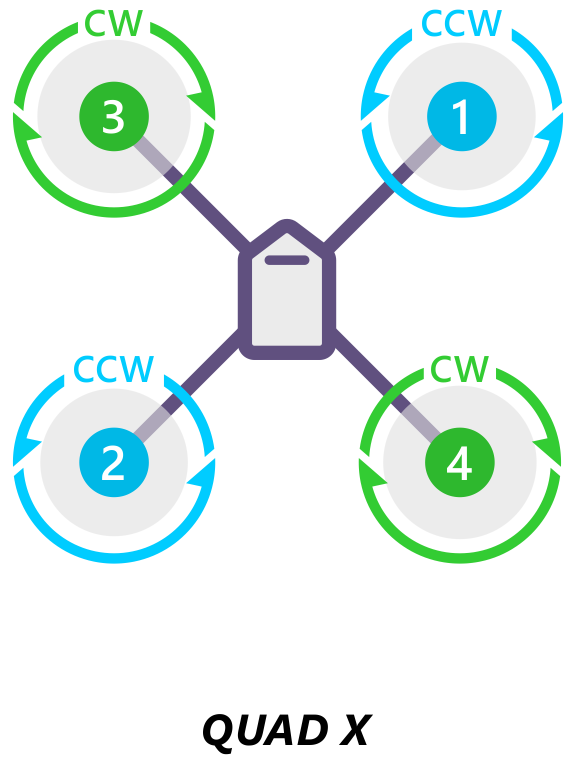
Looking at your log, the 1 and 2 motors are significantly higher than the other 2. If you’re set up with the std x, that would be your right front and left rear.
The copter will want to spin the opposite way that the motors are turning, so 1 and 2 elevated means the flight controller is using a lot of right (clockwise) yaw to correct for something (the craft naturally wants to turn left apparently). Probably twisted motors. This was something I have spent a fair amout of time on over the last few years (getting the thrust straight up and down). My procedure was to 1. Adjust the motor levelness getting it close as I could with a bubble level. 2. Fly 3. Analyze logs to see which motors were elevated. 4 Determine which way the craft was trying to turn and see if any of the motors are a little off causing that… then repeat until the motors are all about the same (on a calm no wind day). I had to do it a bunch of times so don’t get discouraged, good luck!
Hello again, I tried to level the motors as good as I could and I made a test flight for 5 minutes and the motors were still hot. I am sending you again the log to tell me what you think. Should I proceed with the dynamic notch filter or is there another problem?
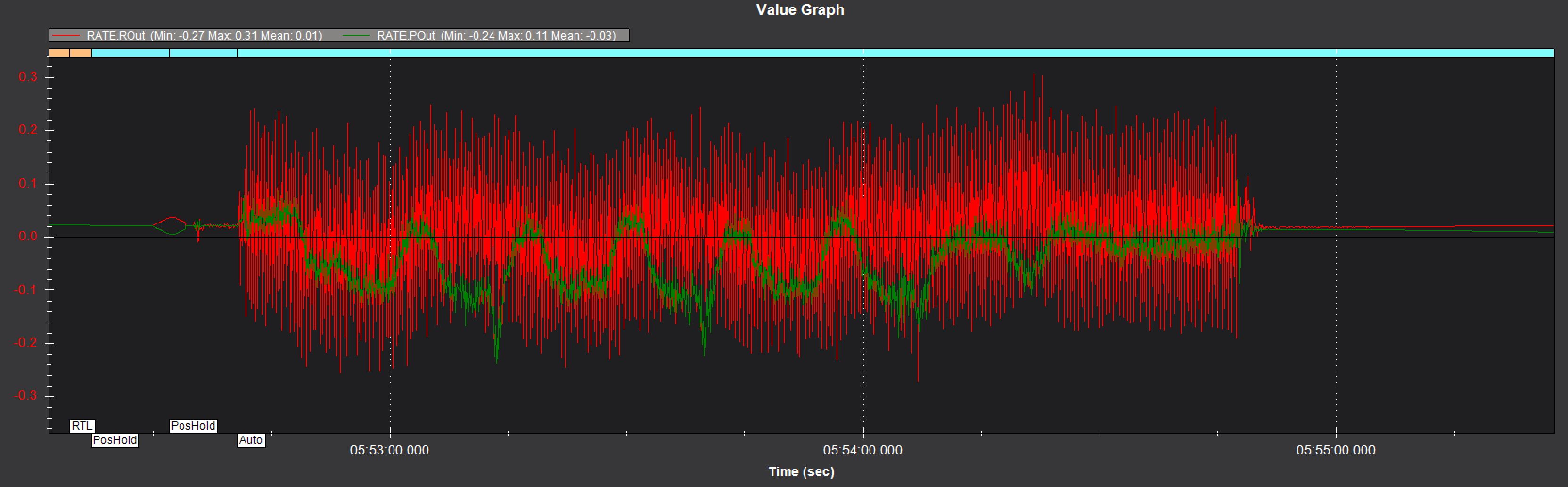
Good job leveling the motors, OK now. In fact I can’t find anything in the log that would cause hot motors. The tune is good, low vibes. So I’m not sure what the culprit is. Configuring the dynamic notch filter is a good idea but I don’t know if it will help the hot motor problem.
Did you solve this issue? I also have the same motor and flight controller setup (T-motor MN4014 400KV and Cube Orange Plus). I disconnected the flight controller and rotated the motor directly from the transmitter with the propeller on it (just like a thrust stand). The motor still heats (cant even touch it for a second). I feel it is either the ESCs issue or the motor is not as good as they say which probably is not the case.
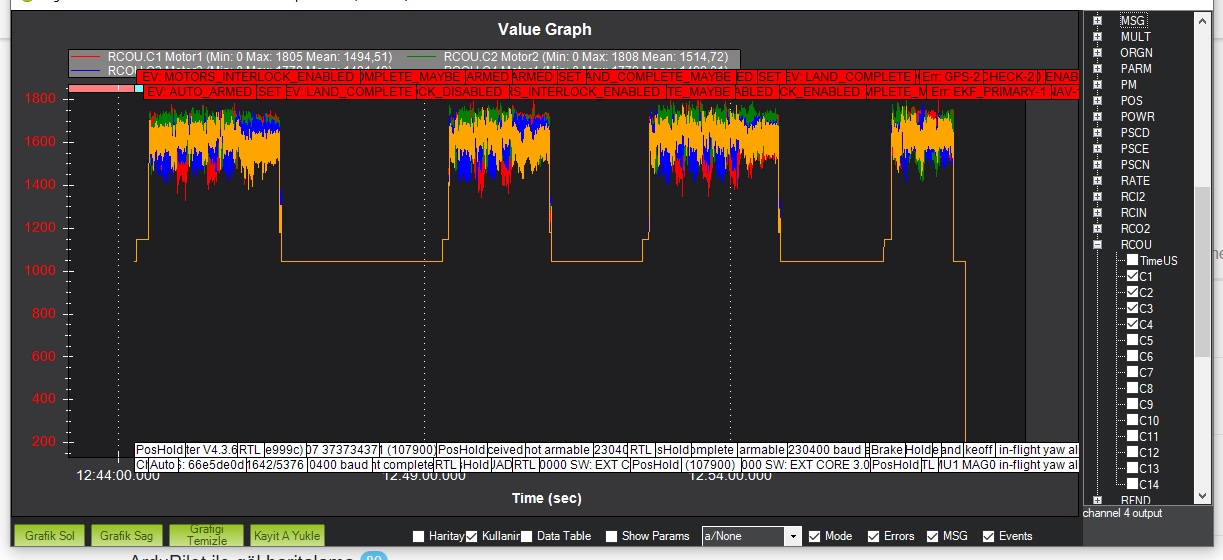
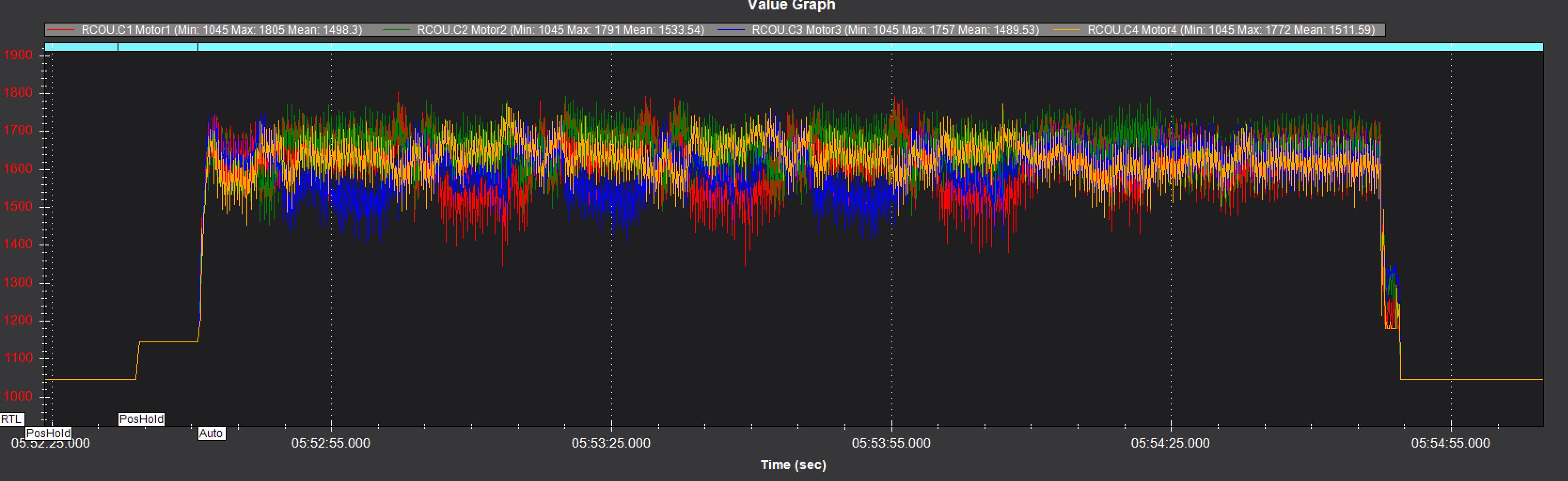
Hello everyone. Dear @dkemxr , do you think these PM outputs are normal? I didn’t want to open a new topic. It belongs to 10lt Agricultural Drone. It belongs to mission flight in Auto Mode. I am sending the log as well.
…
My motors are heating upto 85 degrees celcius after rotating them with props on at 60% throttle for 3 minutes. ESCs also have the same temperature. My prop size is 17*5.5 which is the recommended size for the motors and battery is 6s 16000mah 15C. Motor model is T-Motor 4014 400KV. I used Hobbywing Skywalker 60A esc (Fixed wings esc). Earlier i thought that the issue is that the ESC is for fixed wings so i used another ESC for multirotor (https://robu.in/product/readytosky-2-6s-40a-opto-esc/) but the problem still remains.
Please help me in what direction should i move forward. I mailed to t-motor as well and still waiting for their response.