Can you provide a link to a Flight Log of a simple hover?
@dkemxr Thank you very much. I’ll try it right away and report back.
Dear @dkemxr , I reduced INS_ACCEL_FILTER=10 to D=0.0026. It got much better. Thanks to you.
After doing the necessary research, I will configure the “Notch Filter”.
…
I would like to ask one more question, begging your pardon.
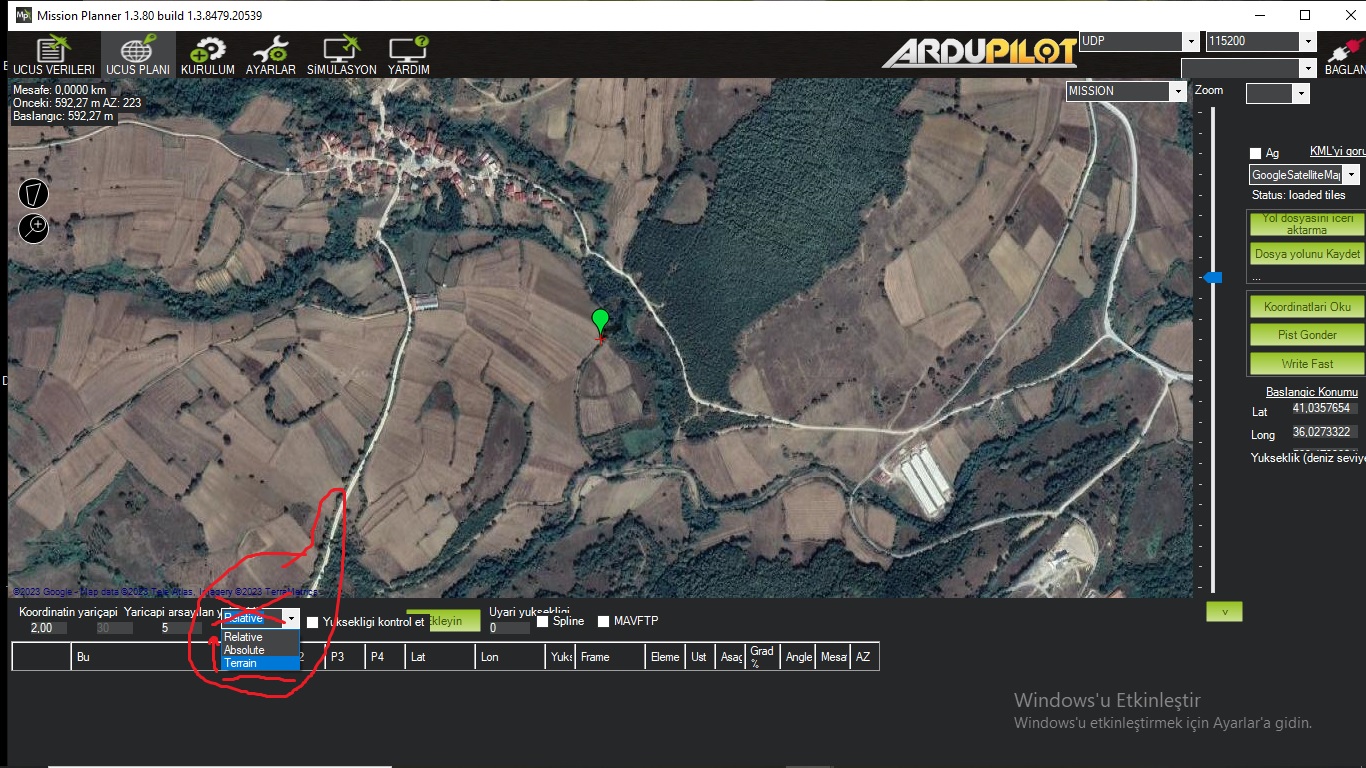
I had an accident today. Can I set “Terrain” as the “Default” of the pictured place? It’s not relative.
…
…
Yes, you can use Terrain. If you don’t have a rangefinder it will use Terrain data from a GCS. One hint is after you create an Auto Mission use the Elevation Graph in the Plan screen (right click>Map Tool>Elevation Graph and make sure what you have planned is right.
Just remember that with GCS terrain data it’s only good at the Waypoints. If there is a mountain between waypoints that you haven’t accounted for (with a WP on the peak) it will crash into it.
2 Likes
Sevgili @dkemxr , değerli bilgiler için teşekkür ederiz. Yeni bir şey öğrendim. Ancak asıl sorunum, Arazi seçeneğinin Varsayılan olmamasıdır. Bugün olduğu gibi tarla ilaçlaması yaparken Akraba’yı unutursam, bir kaza kaçınılmazdır. Sormak istiyorum, bu seçeneği varsayılan olarak Arazi yapabilir miyim? Göreceli değil. Göreceli olarak unutma sorununu da ortadan kaldırmak için
When I select Terrain it remains as the default.
1 Like
When Mission Planner is opened and closed, the “Relative” option becomes the default again. I had asked to make “Terrain” the default permanently. As far as I can tell, it doesn’t. @dkemxr Thank you for your valuable contributions and information.
Hi @Aryaman_Chaudhary, Did you solve this issue? What did T-motors replied? I am also using the T-motors Navigator series motor and facing this heating up issue.
Hi @dkemxr, It has been long time interacting with you. I hope you are doing good. Do you have any suggestions? what is your feedback for T-motors?
Thanks!
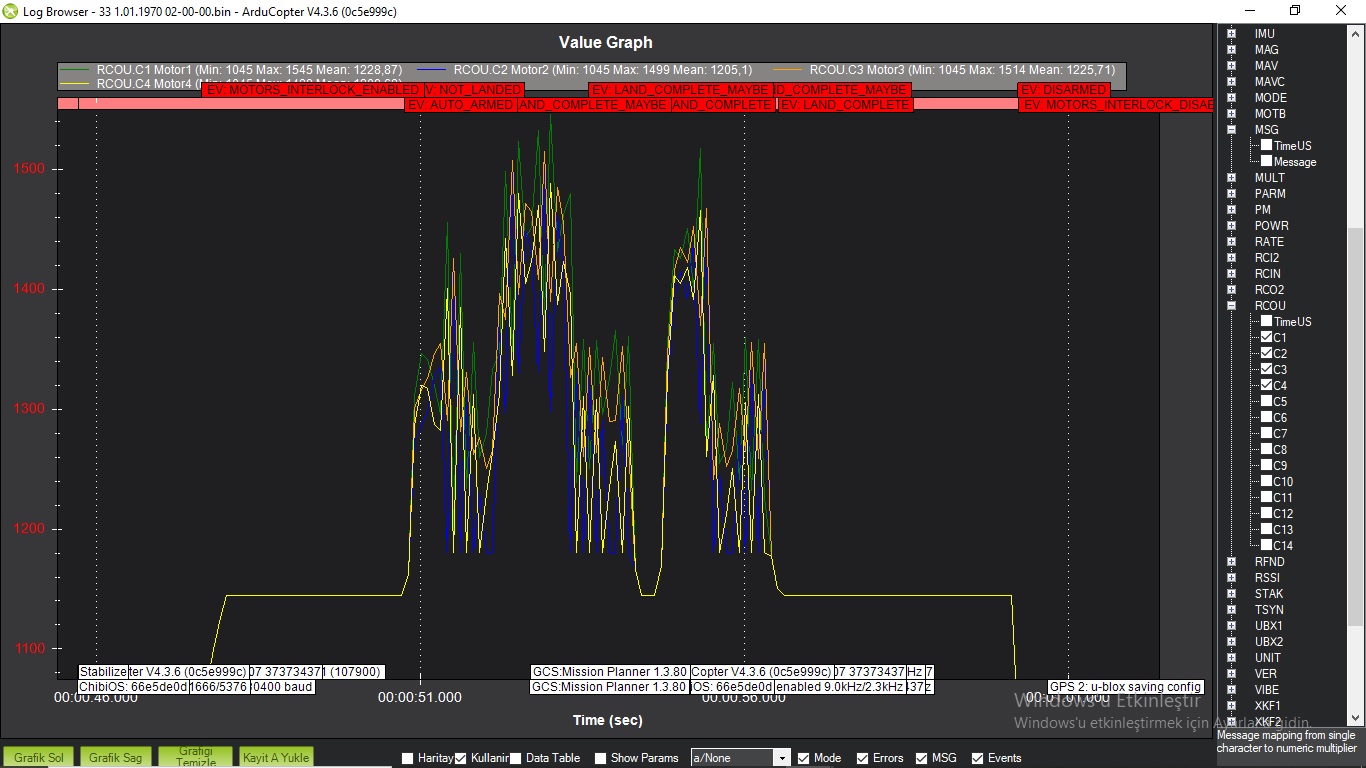
In this thread the problem was tuning. There was output oscillation from the D-term being too high.
1 Like
Hi @dkemxr, Thanks for your response. How to know that these oscillation are caused by the D-term? I can’t feel any oscillation during flight, it feels clean and I successfully performed the autotune 2 times for the vehicle.
Here is the log file for your reference: 2024-04-04 15-24-24.bin - Google Drive
Can you please help me figure out whether the D-term is high or not? and If it’s high what value should I put to reduce the motor heating.
Thanks! as always, looking forward to your response.
I don’t necessarily see output oscillation in this log but an Auto Mission is not what you would use to troubleshoot an oscillation problem if apparent. In the short Loiter section of this log before Mission Starts it looks OK to me.
1 Like
Take a look at the motor screws if overly long they can damage the winding.
1 Like
Thanks @dkemxr, I have been flying this drone for quite some time but recently started noticing the motor getting hot. I am not sure whether these motors are heating up from the beginning or started recently. So trying to find the issue.
I am using these motors: KV400 with 16*5.4"
I know the datasheet voltage is 24v and mine goes up to 20v but in my case; the on an average motors are consuming 8A-9A which is quite low to heat up the motors.
I have tried to reduce the d-term up to 50% down of the current value but nothing much changed in motor heating.
Thanks @Quadzilla for your response. Yes! I have checked it nothing is hitting anything.
Hi @dkemxr, I hope you are doing great. Still figuring out the motor heating up.
I am noticing a little frame wobble during take-off, I have checked the forum and it is supposed to happen because of ground resonance or weak landing gear. I have checked the logs and it seems motors and props are in same plane (maybe a very slight difference)
Here is the log for your reference (flying in Althold mode): 2024-04-06 19-04-59.bin - Google Drive
I have felt little oscillation in roll and pitch angles in the log, is it a tight PID tune or something else? and how are my vibration levels? during wind condition in auto mission, Y and Z vibration peak goes up to 20 but the mean value remains under 15. Should I try to reduce more vibration? if yes then putting the dampener for FC will help in this? or these vibrations are acceptable?
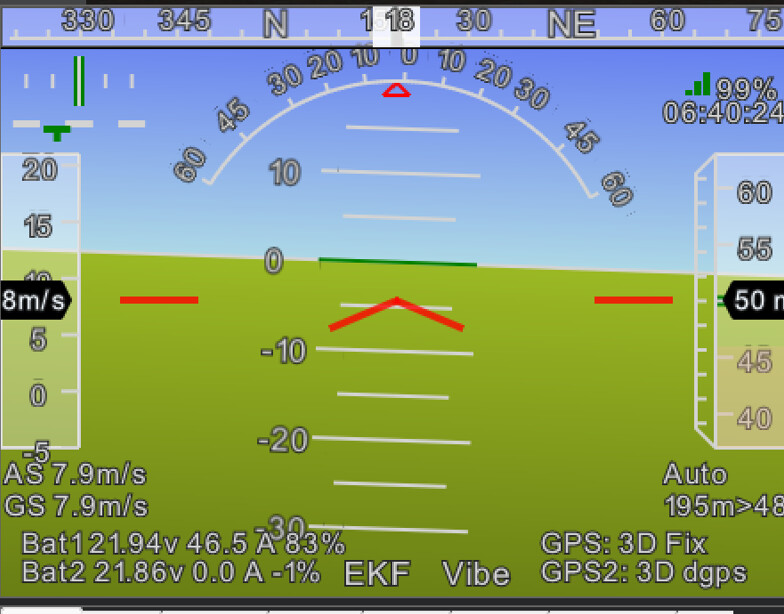
Edit: One more thing I forgot to mention, Why does my drone fly in some roll tilt (always in auto mission)? I know it will happen during the right wind push (in the case of below photo) but isn’t the autopilot take care of this by running the left side motor a bit faster?
Thanks! looking forward to hearing back from you.
No, it needs to tilt in order to exert a lateral force. That is simple physics.
1 Like
Hi @amilcarlucas, Thanks for your response. I understand the lateral force but only pitch angle required to have a lateral force to move forward. My question is why does there is a slight roll angle (every time) while flying forward straight?
And can I get your response or feedback on my other query please? Thanks again and will be waiting for your response.
Level the whole copter across the top of the motors with a spirit level by packing under the landing gear.
It is the whole “prop disc” you want to get level.
Then in MissionPlanner / Setup / Mandatory / Accel Calibration press “Calibrate Level”
1 Like
Hi @xfacta, Thanks for your response, It is good to see your message. Yes! after your advise (long back), I have been doing the level above mentioned way.
This roll tilt only shows during straight flight in auto mission. During hover flight the aircraft looks exact leveled. Just for your reference, My hexacopter center motors (Motor 1 and Motor 2) are facing downward so they are not leveled with the other 4 motors. Same like this: http://yuneec.uk/index.php/products/h850-rtk
Thanks!
even when flying straight there is lateral wind, hence the roll angle, to compensate for that lateral wind.