I had a question that I was wondering if someone might have some insight into. I am trying to hook up an external barometer to a MRo Control Zero FC as the prop wash I am getting on the FC while the drone is on the ground makes altitude hold unusable until I get out of ground effect. I have this Barometer GY-63 MS5611
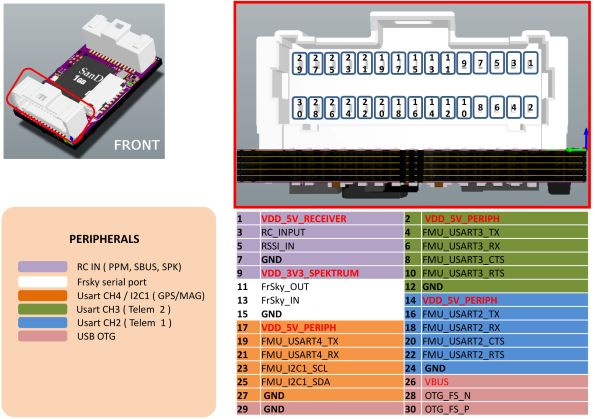
I am hooking SCL from the baro to to Front pin #23 (SCL) on the FC and SDA from the baro to front pin #25 (SDA) on the FC. Ground to pin#27 and VCC to pin #17
I have followed http://ardupilot.org/copter/docs/common-baro-external.html and set parameters GND_PROBE_EXT to 4 and GND_PRIMARY to 1, but looking at my outputs it doesn’t look like i am getting any data back from the external baro, “press_abs2” is always 0. I have tried 2 different baros and 2 different Control Zero boards. I am probably just missing something simple i just don’t know if there are any other parameters I need to set. Thank you for any help you can provide.
I saw that in the code as well but tried both addresses anyways, but I
still get nothing? One other thing I realized was I was on Copter 4.0, I switched back to Copter 3.6, as that is what the guide said was supported, and parameter GND_PROBE_EXT no longer exists. I was wondering if anyone out there using an external barometer successfully? Or, any advice on how to have a racing style drone, take off successfully while in altitude hold mode(without a lidar). As soon as I arm the drone and the props start moving my displayed altitude drops couple feet from the prop wash.