I am currently using holybro x500 V2 with orange cube.
when I arm the copter, the motors sound is so harsh and even get hot, but when I calibrate the ESCs and in the last step when I raise the throttle , the motor sound is smooth, but again when i reboot the copter and arm it , the motor sound is very harsh again with lots of vibration. I tried every thing i know and didn’t got lucky to solve the problem
At the end I used PX4 instead of Arducopter and the problem gone and motor sound is smooth when arming.
I reinstalled arducopter instead of px4 and the problem is happening again
I guess is parameter problem but dont know where exactly
Dear @amilcarlucas
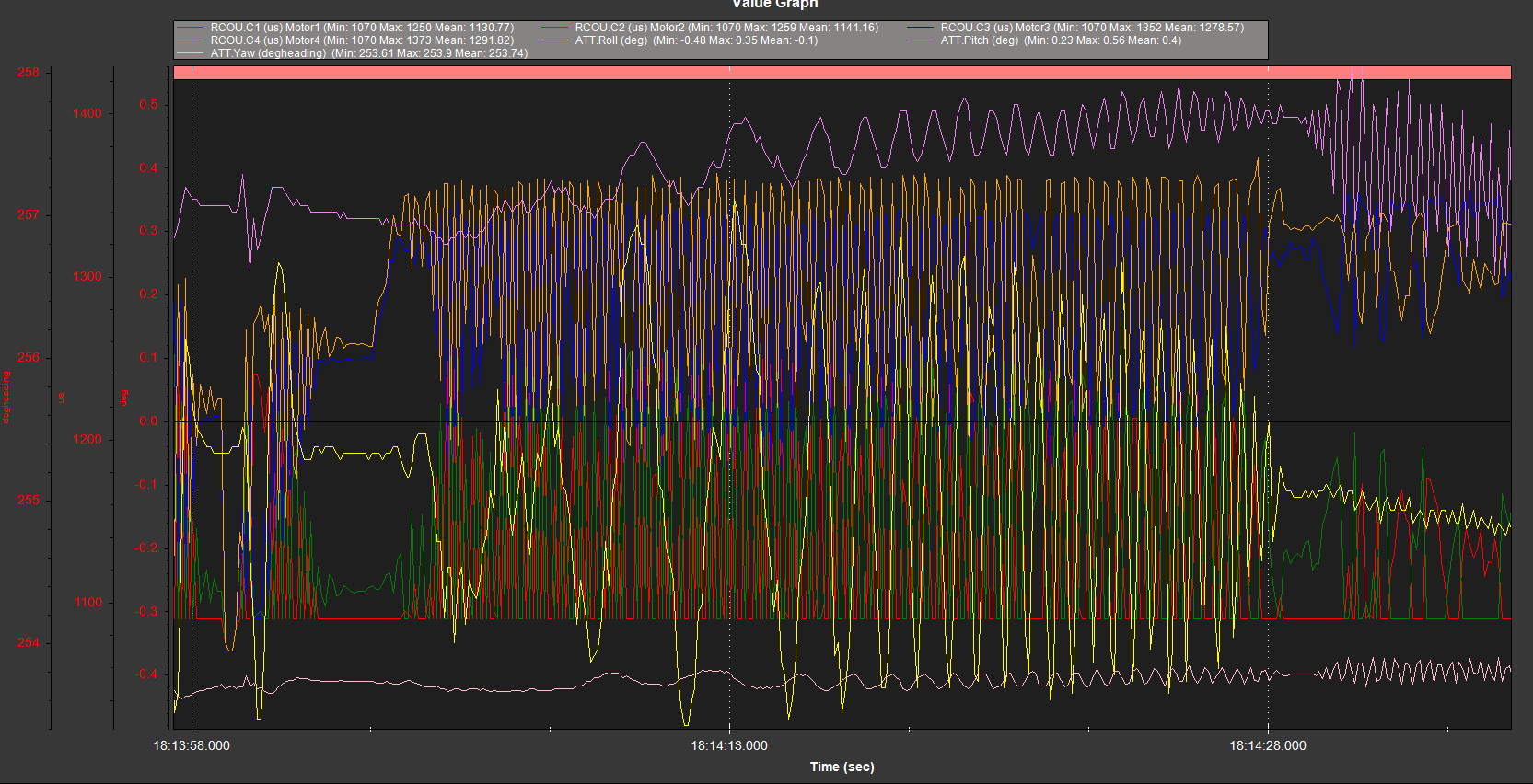
I did the mandatory hardware setup but not the notch filter, the vibration level is so high, actually it goes and back, for example when I arm the copter for longer time, motors stay with harsh sound for long time then become smooth for 1 or 2 seconds, then become harsh again, and become also hot
I would start by reducing these to half their present values
Then checking and rechecking prop rotation and order using MissionPlanner motor test.
Also check prop and motor balance → use the motor test to spin each one and see if any produce unacceptable vibrations or are out of balance.
Ensure all the motors and props are properly aligned and not twisted on the arms.
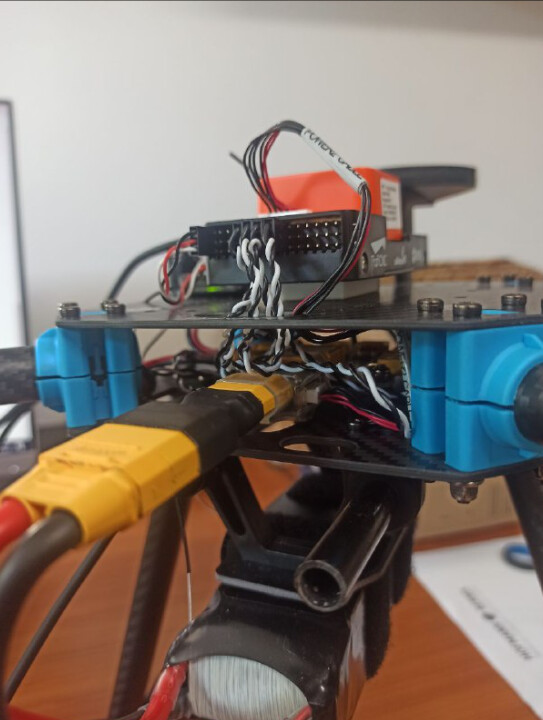
What is the flight controller anti-vibration mount like? Too soft maybe? A Cube may not need any anti-vibration mount. Please supply a photo.
Don’t try to fly this until you are sure it’s fixed.
thank you for your answer
I have modified the parameters, I cut them half, still same results.
regarding the prop, all my tests have been done without prop, all those vibrations are from the motors alone without prop.
when I test the motor from mission planner ( Optional hardware - motor test ) motor sound is very smooth.
the problem appear when I arm the motor and raise the throttle , then becomes very harsh sound.
I don’t think the problem is from the anti vibration, am using orange cube anyway, since the motor test shows smooth sound for the motors.
In fact Orange CUBE was specifically made for PX4 firmware functions in some ways as far as I see. I too had the my QUADCOPTER going smooth on first instance using PX4 firmware on Orange CUBE . I am not a fan of either firmwares but i can see the results on first instance
This is not true, Cubepilot recommends and gives support for users running Ardupilot. The difference you noted between different softwares can be caused by tons of factors.
Just a quick look in parameters and I see your battery is set to 6S ?!?
When you set initial parameters, it ask for battery type and propellers length , this is important to set it correctly as the controller is expecting to work with these parameters.
Thank you guys for all your answers.
Problem has been solved.
the problem that I was putting the cube in this kind of double face to stick it to the copter and i was not hard mounting it to the frame.
after that , the harsh sound gone and motor is smooth again.
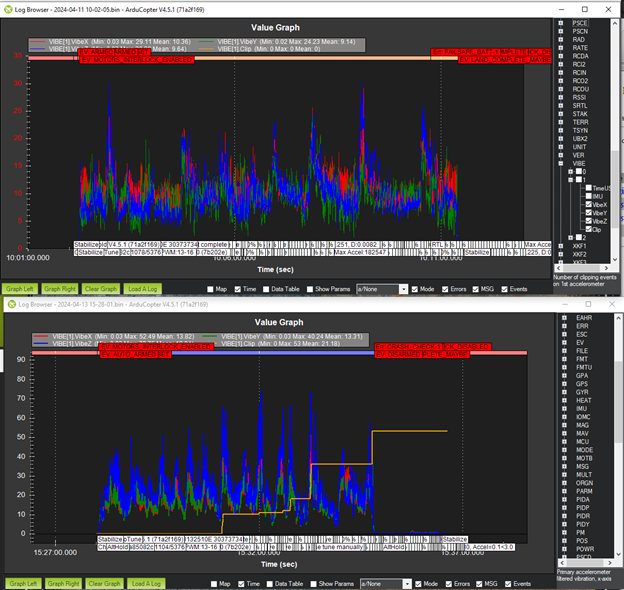
I know this is an old post but I stumbled into a very similar problem with my own X500 V2 that I just set up. Originally, I hard mounted my Holybro Pixhawk6X baseboard assembly directly to the screw holes in the top plate and I did some initial tuning and testing in that config. Subsequently, I followed the recommended practice of mounting the autopilot with 3M VHB tape and I noticed my VIBE signals (X/Y and Z) basically doubled, which was the exact opposite of what I expected.
Hard mount VIBEs around 15 m/s/s (top image), VHB mount VIBEs peaking 60-70 m/s/s (bottom image) doing the same maneuvers (throttle sweeps, hover, and some mild pitch/roll maneuvers in stabilized flight).
Just in case anyone else has the same problem, my setup definitely seemed to favor the direct hardmount.