It should all work. I have one (AIO version) working with all of those functions with Arduplane, Copter should be no different. I don’t see any reason why Landing Gear won’t work either.
Note: I’m using a R9MM for the Rx and Passthrough telemetry works fine with the inverted Sport output. But Ardupilot now supports configuration for non-inverted or inverted by parameter so you should be good.
Dave if I use frsky xsr could I have tellemetry values back to my taranis?
At my big copters with pixhawk I use X8R and I use the craft & theory cable connected at s-port of X8R and I get all values like HUD volts amp altitude etc
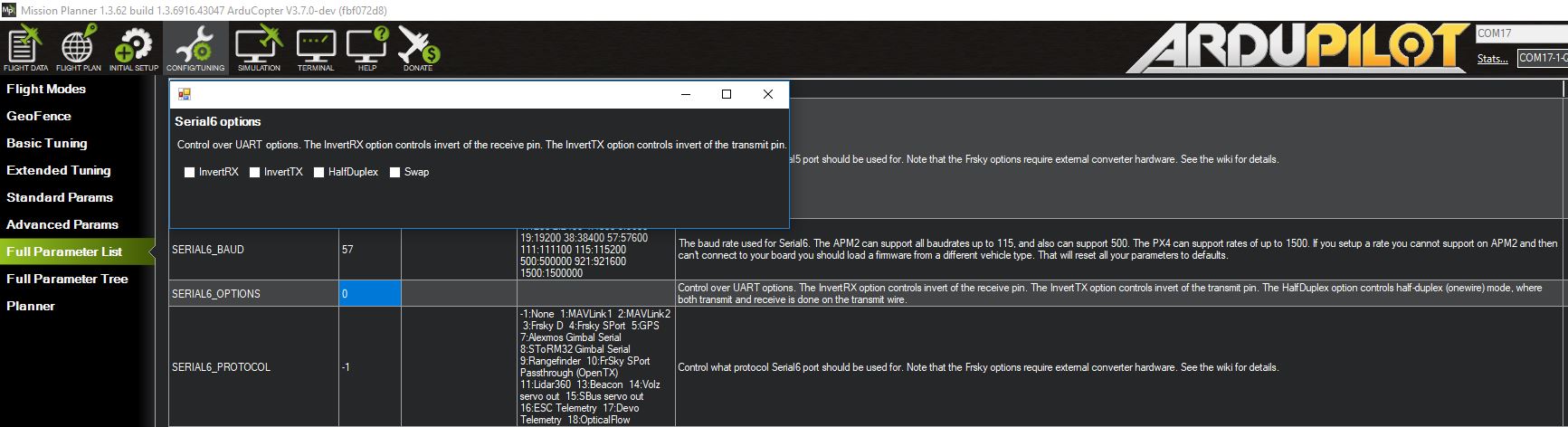
Yes, but you have some options. If you are using Copter 3.6.3 (current stable) then you will need the C&T cable. If you load Master (3.7.0-dev) then you don’t need the cable because there are parameters to invert the Sport and force half-duplex. These are the new serial port options available with the dev version:
I should add that the XSR should work and I believe it will. But I have an R9 Slim that definitely does not work and it should. I replaced it with an R9MM and all good. I think this is a problem with the firmware on some of the R9 series Rx’s.
esc position signals are done in the ‘default’ build for F7 AIO. it has correct mapping for each corner considering orientation of the AIO F7 chip is correct facing forward belly down. mount it on small 5mm rubber posts. assignment of PWM motor outputs to pins is never automatic, and for F7 chip with an external 4in1 ESC it will not match, most likely. you would need to pull wires of connector or rebuild code with re-assigned PWM outputs
Im new to ardupilot,
I had it wired correctly for inav but want to try out ardupilot.
How do you get the futaba sbus receiver to work, as well as the BN880 compass and GPS?