Could anyone with FFT experience have a look at this log for me?
I have a large X8 running T-motor U8 170Kv motors (28x9.2 props). Current take off weight around 13Kg hovering at around 30% throttle
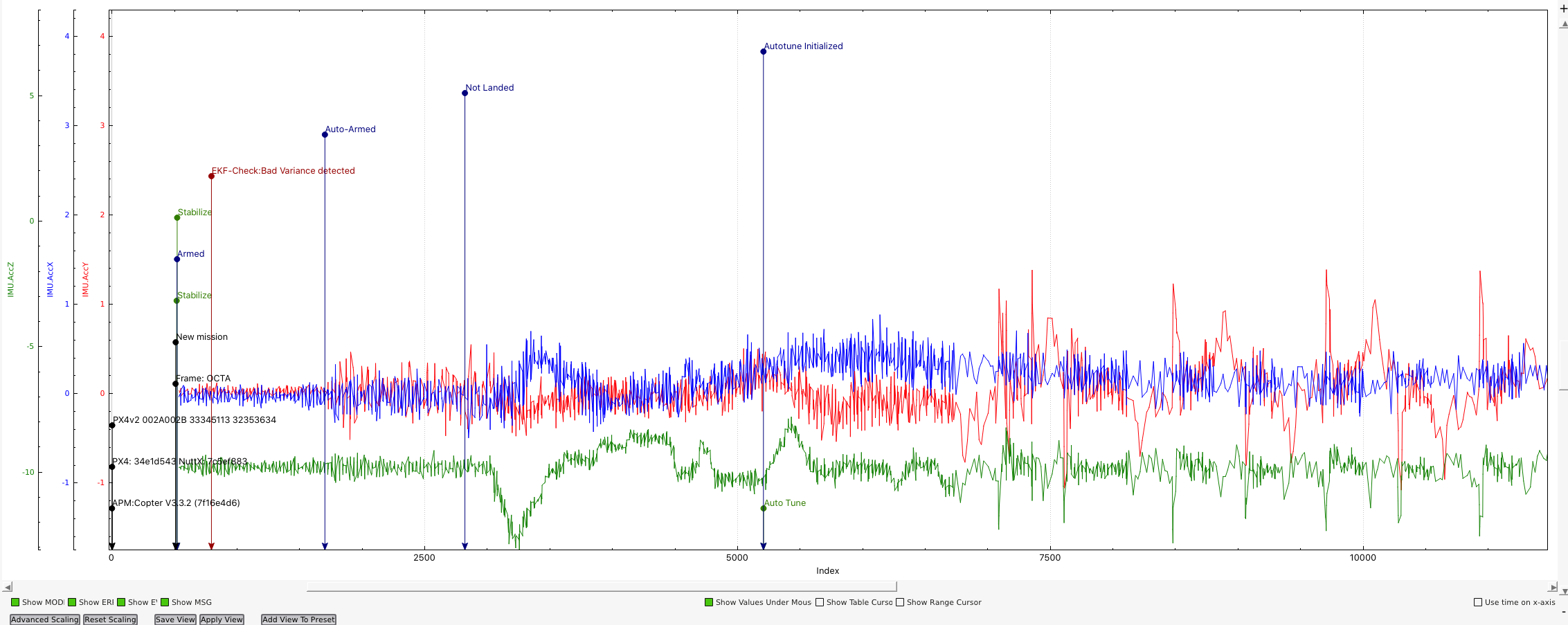
Flies great but get vibe clipping in mission planner HUD. No EKF errors so far. Looking at the FFT I have high levels of vibes at around 70hz.
The wiki for FFT says that “Vibration at frequencies above 300Hz may lead to attitude or position control problems.” Does this mean that the vibrations I am seeing in the FFT can be ignored?
Your FC is picking up a reasonable amount of vibration, as indicated by Clip0.
Have a look at the IMU data as well.
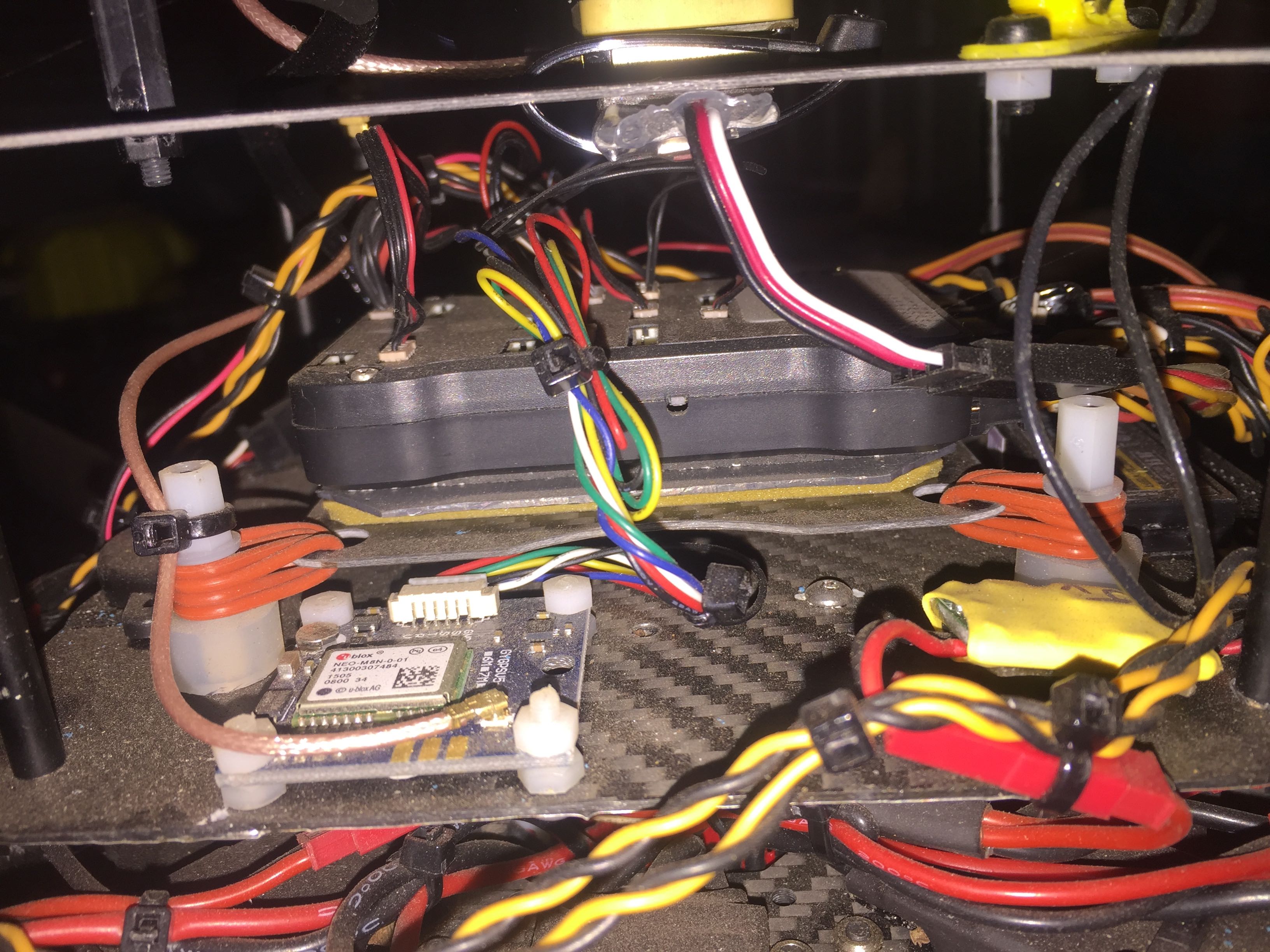
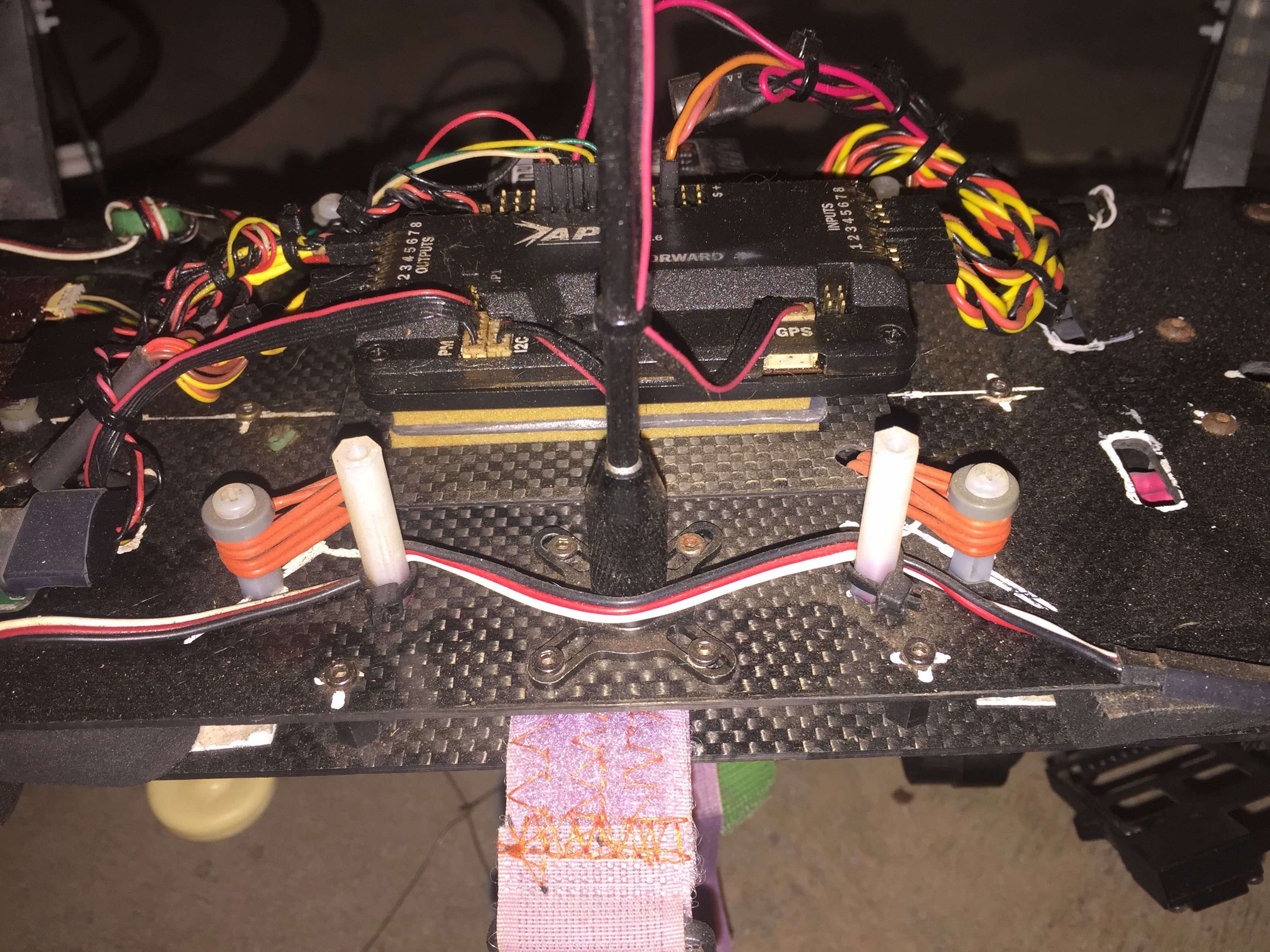
How have you mounted your FC?
Could do with a bit more vibration dampening.
It’s not extreme, as the good old Arducopter is coping with it for the time being but you should reduce those Vibes so that clipping is not occurring.
I expect the same from the larger build ready to fly at the moment.
You are going to have a hard time with the X8 frame to limit direct vibration.
I use the ‘O’ ring suspension method exclusively.
The carrier is a CF base plate, and the layers are combinations of vibration absorbent foam, but the important part is the layer of lead. This tailors the absorption to desired frequencies.
My concern is that I’m using the cube which already contains damping. Adding extra damping might cause resonance with the internal damping making things worse.
I going to have to say the the cube should not be dampened .not to be a ass but i never dampen any of my builds with the exception of two sided tape if needed to glue the controller down.
I have several builds with the Cube, damped the same way, but they are sealed up so I couldn’t get any pics for you.
To each his own.
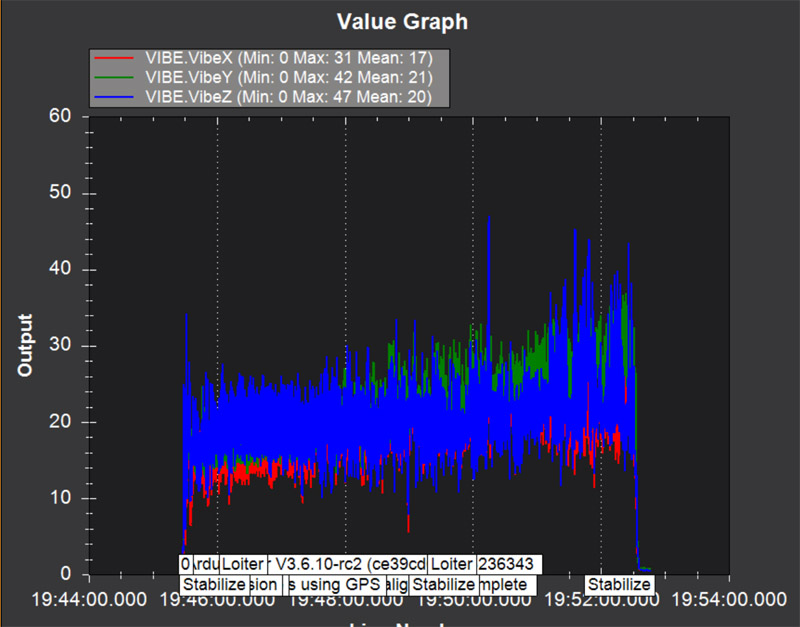
I think the IMU vibration graph I posted speaks for itself, as does the stability and precision of the copters flights.
If you don’t understand the mechanics of aeroelasticity in the generation of some of the vibrations, as well as the inherent vibrations induced by the drive system, then it is good to just use the supplied foam.
Mike I am sure you are right but quadsours is also correct per Profi. That said when my cube had a flyaway vibrations were the cause. I had the cube mounted just on foam 2 sided tape.
Argreed Philip R of the Cube said no to damping, The use of tape is not a second thought and a well made frame requires no damping in my opinion but if you fixed a issue by adding damping it all good but just not for my work.
It may not be the perfect solution for this issue but what props you have make a huge difference. For bigger frames CF props are required as they are stiff enough but maybe you already have.
I have a huge X8 with a Pixhawk that flies well. The frame is dual layer CF and the arms are 25mm CF tubes. Low RPM and 15" CF props.
Can anyone share some light into the Vibe(x/y/z) readings !?
Because I’m looking at a log, and on both IMUs ACC(x/y/z) and GYRO(x/y/z) have decent values and little peak/valley amplitude, but the Vibe starts growing until clipping happens. In straight forward flying.
Is the Vibe a delta between the expected ACC/GYRO readings and the actual recorded values ?
Because damping an IMU won’t help your Vibe levels if the above is true and your powerdrive lags in autopilot response. And that’s what I’ve seen in builds geared for efficiency - low kV, big prop, big inertia to “fight” against, fast, to satisfy autopilot demands. Different PID loop variable values in rate should be the solution.