Called it 
Got a log?
Called it
Got a log?
You did! Happy to share the log.
Thanks Dave, Great work!
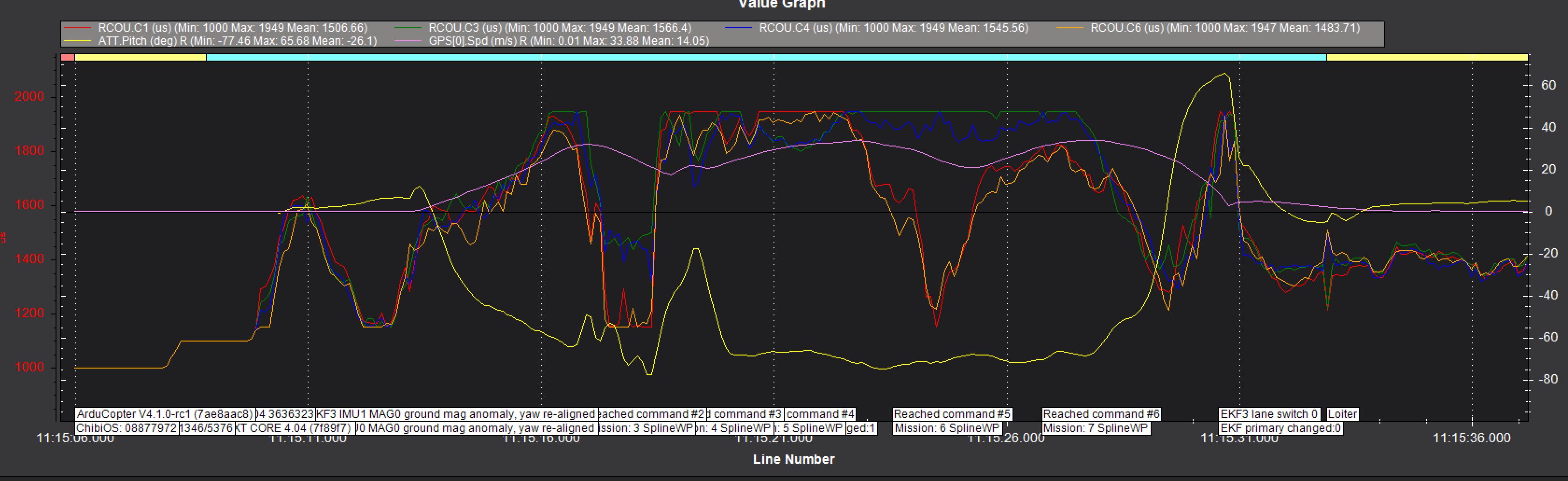
I was out on the angle. I was hoping you would get a few more degrees. The throttle is fluctuating so there may be a bit of tuning to be had. But you are now sitting on the throttle limit where the maximum lean angle and therefore speed is limited by your ability to keep throttle below 90%.
So my call wasn’t as accurate as it may have looked. But now you are very close to the limit of the aircraft. As far as I know you are only the second person in the world to do this. Congratulations!
Thanks Leonard, it has been a lot of fun pushing the limits!
Can you share your parameter list please. Results are incredible
You can extract them from the posted flight log with Mission Planner. Use the Create KML+gpx button. It’s 4.2.0-dev but Beta8 should work just as well for fast Auto flight.
I suppose everyone flying water bottles around fast will be interested
Thanks Yes It will be really interesting. You can check TEKNOFEST’s which is the biggest technology festival in the world website. Organization accepts international competitors. https://www.teknofest.org/en/
Actually we will need tuning help after we increase the speed because our tuning is probably just OK! Not perfect. We will see if we can stabilize
@Leonardthall @amilcarlucas @dkemxr
Can you help me to analyze the flight and improve it? Im trying to achieve higher speeds in parkour.
https://drive.google.com/file/d/1hz_3xG5UNbMo-5SRpGWmw9IGRlwgJ4_8/view?usp=sharing
Holybro Pixhawk 4 + GPS module
Sunnysky x2216v2 x4 motors
10.45 inch props
1750gram
Velox 45a 4in1 dshot600 esc
Running on ArduCopter 4.1beta8
Thanks in advance
Edit: I am not sure if you can see parameters from the log file so here it is: https://drive.google.com/file/d/11x-hbp6ytNbouqJqysw3YyJdjBwDjGNI/view?usp=sharing
You need to start with some long straight missions so the aircraft has time to settle into a constant state. You should also start with straight segments on your mission as they are better defined from a kinematic perspective. Once you have a good setup then you can start evaluating tight spline missions like this one.
I am afraid of going over 45 degree, would it be safe to try 60 degree?
I will upload another log file after the straight long mission.
Thanks.
You can go to 80 degrees. Just step it up slowly as you get comfortable.
We had the best test of our drone so far. 45 Degree angle 25m/s speed 970 Accel and 5 Jerk. But quad’s circling is too slow. Probably the best flight data ever we produced please take a look at it Here is the drive link: https://drive.google.com/drive/folders/1RTlVIuGihhA9tRRZWH3_np_L0Aq_zZlf?usp=sharing
@Leonardthall @dkemxr
Is it safe to set WPNAV_JERK to something like 10 according to the test flights that I had
Hi again. Yesterday we had the best test flight of our entire Teknofest adventure. It was majestic I can say. Here is my configuration:
FW: ArduCopter 4.1.0
FC: PixRacer Pro
ESC: T-MOTOR F55A
Motors: T-MOTOR F80 PRO 2500KV
GPS: UBLOX-NEO M9N DUAL COMPASS
Battery: LEOPARD POWER 4S 1300MAH 200C
Props: T-Motor 5055 Tri-Blade
Loaded Weight: 1650 Grams.
So eventually we got 4th place with 81 points after some petty issues but we were one of the best contenders until the end. Thanks for everything guys. We literally maxed out every parameter (As I could learn from this forum) so far and it did not crash. Here is the drive link to my Masterpiece. Please enjoy:
https://drive.google.com/drive/folders/1KngeuuR1nwIKXHZ9M36ggZ35Pa7q8Ier?usp=sharing
A respectable finish, good work!
Thanks Dave you helped me so much that I can not even explain. My ESC can spin the motors (with a 4S Battery) as much as 27000 RPM so Can I say that I literally maxed out ?
Oh yea, it was maxed out 
I admire the gutsy move to crank up the relevant parameters in an attempt to win. It’s what I would do!
Haha Thanks. If we did not have an accident that was a solid win but anyways. We are pleased with the score!
Hi Guys.
Your Auto-Mission-High-Speed-Flights are awesome! So I have build a QAAD Singularitum V5 with T-Motor F80, CubeBlack and FETtec 45A 4in1 connected over FETtec OneWire protocol.
Here is my first attempt from yesterday. There seems to be a problem, cause I can not rise fast enough, it behaves sluggish vertically. This causes crashes on the floor, cause I can not stop it. Have not found the parameter, that is holding its potential back. I increased all SPEED_UP and SPEED_DN parameters for PILOT and WPNAV and think that I increased the Acceleration Parameters. Maybe I am missing one here.
I can accelerate fast horizontal on both axis but it “punches” only for a few seconds. Then it goes over to a slower forward flight. The height is hold very well mostly.
Here is one log file showing the sluggish acceleration and one with a Auto-Mission. I noticed that yaw behaves really slow. What do I have to do to use S-Courves? Is it spline in Mission Planner?
I copied some settings from dkemxr (thank you for sharing) and will try today again. Maybe you have some suggestions for me