That’s about what my 5" is doing. I’m going to wind it up a bit more also but it looks like yours has more thrust available so you would likely win a drag race
Not that your tuning is a problem (looks good), just curious why you are not using RPM reference for the Dynamic Notch filter? You have the Bdshot version and haven’t enabled that either which is a better reference than ESC telemetry.
Better now than later I would say. Graph your IMU0 clip events… The Dynamic Notch isn’t active on the accelerometers but it is essentially considered Initial Tuning parameters now.
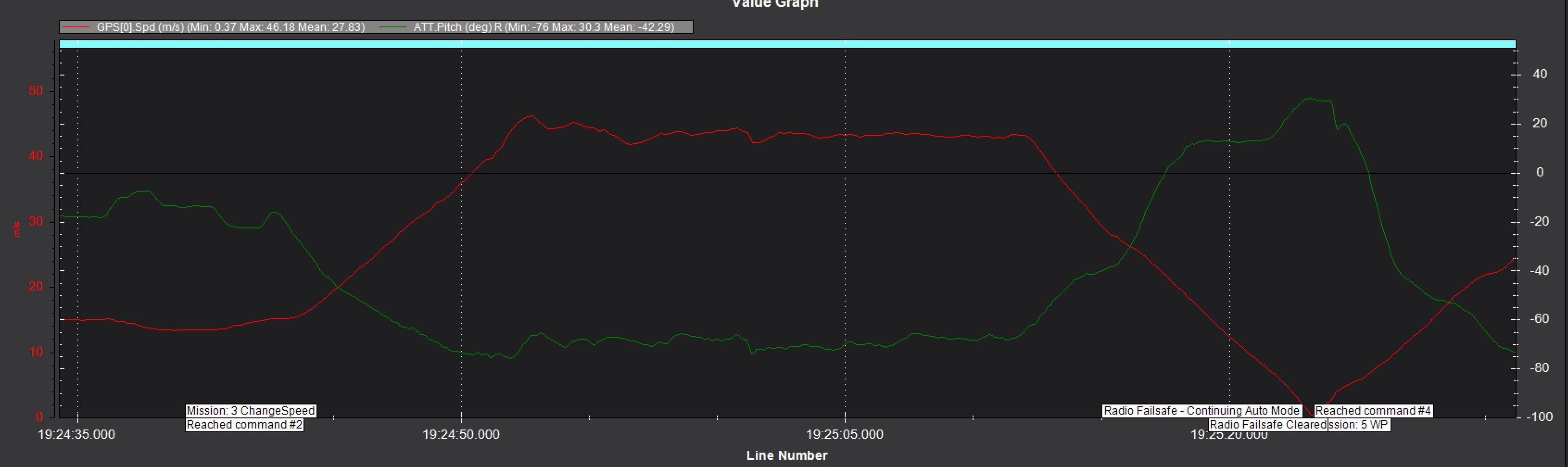
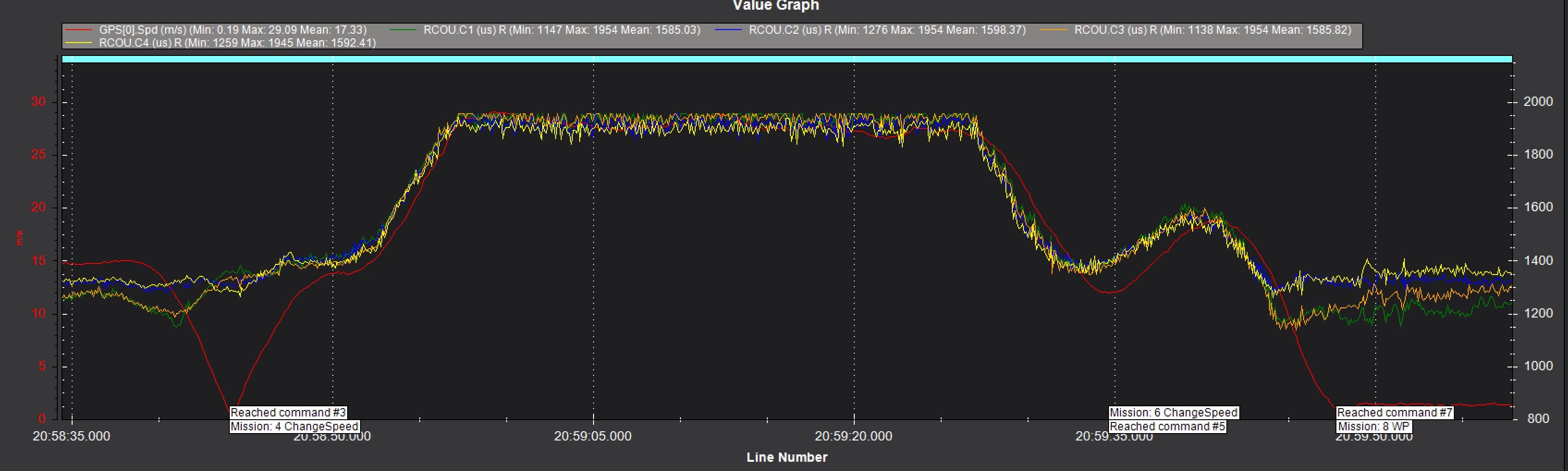
So I maxed her out. ANGLE_MAX to 75° and a WP Nav speed of 40 m/s which it couldn’t reach. Why is obvious in the RCout graph. " I’ve giv’n her all she’s got captain, an’ I canna give her no more" as Mr. Scott would say
You can see that you can open it right up and it will take care of the limits. If you plot your desired altitude vs altitude I think you will see that it was quite happy sitting on the limit.
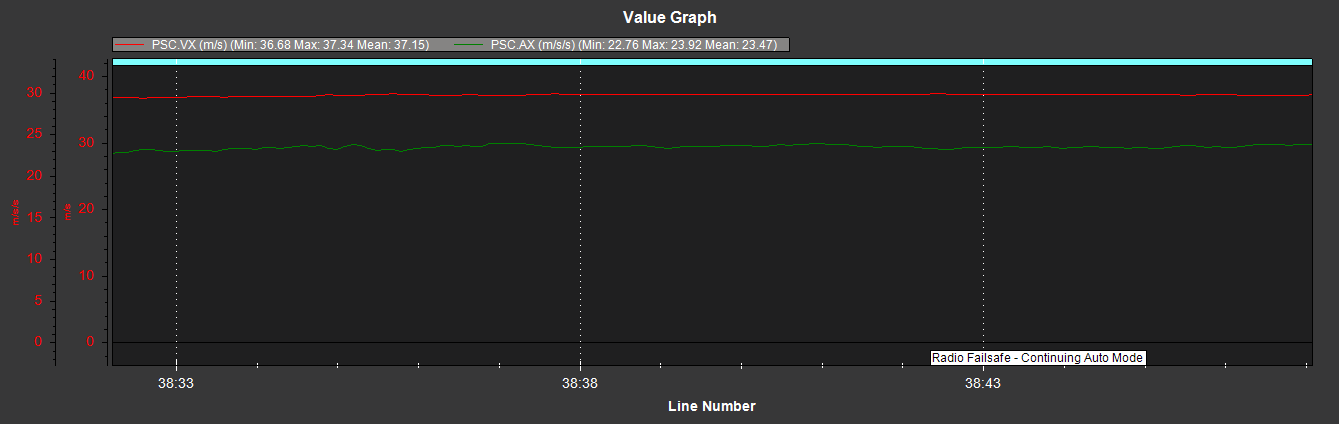
It’s overlaid, no error to speak of. I find it quite amazing that attitude and altitude control is so good with all motors running close to max. What a success story!
Yeh, it took a lot of work and thinking to get there but most people are completly oblivious of what the autopilot can really do when set up correctly.
Thanks for the hard work Leonard - I haven’t done high speed missions (or even high speed runs like that with RC control) but my son has/does/will for sure, and we appreciate the developers efforts.
Your height is a little off because the EKF is struggling to get the vertical velocity correct do to the vibrations. IMU 1 is clipping a little. IMU 2 looks a little better.
Thanks for sharing this. It is great to see people taking advantage of this so quickly and pushing the limits
Hello guys, I have a similar problem, unfortunately. I tried to apply the solutions here to my quad but
I can’t increase the speed of the quad in auto mode. I downloaded the beta final version as there is a chance to increase the tilt angle. I also made the fft notch settings. I set the waypoint speed to 20 m/s. I set max_angle to 75. but unfortunately it doesn’t. I can’t go over 7m/s. my hardware:
cuav nano v5 FC,
little bee spring esc, emax rs2306 2750 kv engine,
cuav neo3 pro gnss gps.
frame 250mm.
Quad flies great in manual flight, I can give the speed I want, but as I said, when I switch to auto mode, it becomes very cumbersome. I’m putting the log and bin files of the manual flight and the bin file of the auto mod below. I will be grateful to anyone who knows how to fix this. https://drive.google.com/folderview?id=1-2Nv1Bgdz8KGwZv6zF8wVHSO_Ci5EE45
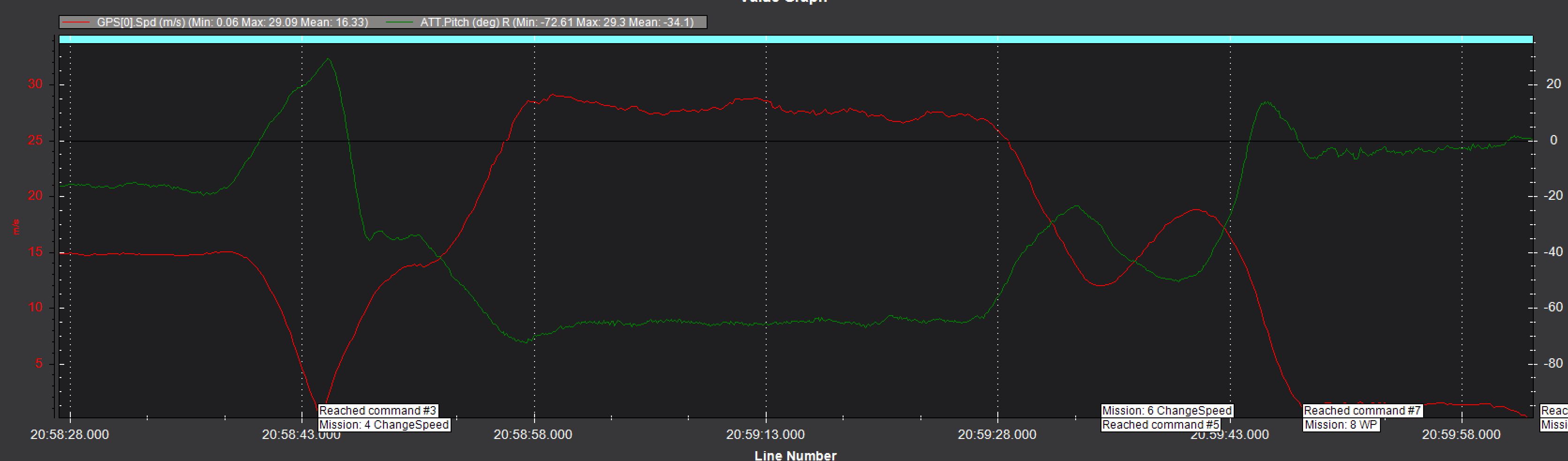
I tuned up a 4" and put a battery in that could supply the current and got some truly impressive Auto Mission speed runs with this craft. ~38 m/s with a pitch angle of 72° with really good stability. 72° !!
I don’t have anything faster Hats off Mr. Hall.
Hey! I’m also trying to achieve higher speeds and I had the same problems. Like when I calculated with a 5S 1300 mAh Battery I should have like 30000 RPM in full throttle but with the parameters(here:save.param (18.6 KB) ) it can barely fly with 20000 RPM for each ESC I could not go higher than 23~m/s when calculated drone should do like 35 m/s like you. What do you guys suggest I could understand the reason. And here is my last test’s bin file (2021-09-04 01-41-26.bin (898.1 KB) ) and lastly this is the mission: (https://drive.google.com/drive/folders/19LnoztaUR-a5tQkHoFOXko56K94vpdzg?usp=sharing)
Your maximum lean angle is only 45 degrees and your mission is too short to reach that limit with low accelerations. Even then your WPNAV_SPEED is only 2000. You need to start with what the basic parameters mean and work up from there.
.
You were pretty spot on @Leonardthall ! Average ~43 m/s. The motor commanded outputs are now maxing out and it’s bouncing off 100% throttle. Battery was very hot but it was supplying 105a.


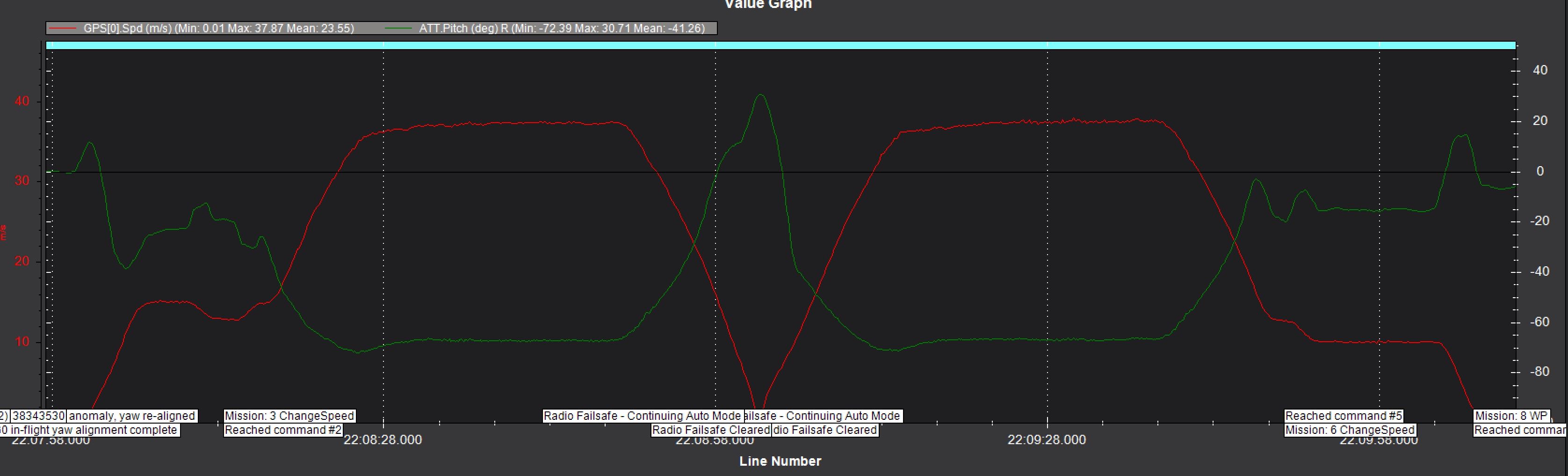
 but it was supplying 105a.
but it was supplying 105a.