During a test with Pixhawk 2, Arducopter 3.6.11, my drone just turned upside down on takeoff. Upon looking at the logs, I found that the there was a higher desired roll. I have been testing the same drone for quite a sometime, say around 2-3 months but I have never faced such issue.
Update to either 3.6.12 or 4.0.4
Make sure the copter is on a level surface before taking off. Make sure you take off directly after arming, do not wait too long before taking off.
Thank you for the response. I have two questions related to your reply:
Update to either 3.6.12 or 4.0.4 - Is there any existing issue with version 3.6.11?
Make sure you take off directly after arming, do not wait too long before taking off. - Why do you say this? Does waiting for few seconds cause any problem?
I say that because the I part of the integration error will accumulate causing in certain circumstances the copter to lean while takeoff. yes waiting might cause the problem you are seeing.
Regarding the update, can you precisely point out what is the issue with the version and how can we reproduce it? I am asking the question because I have been using the same version for around 6-8 months and have not seen anything like this.
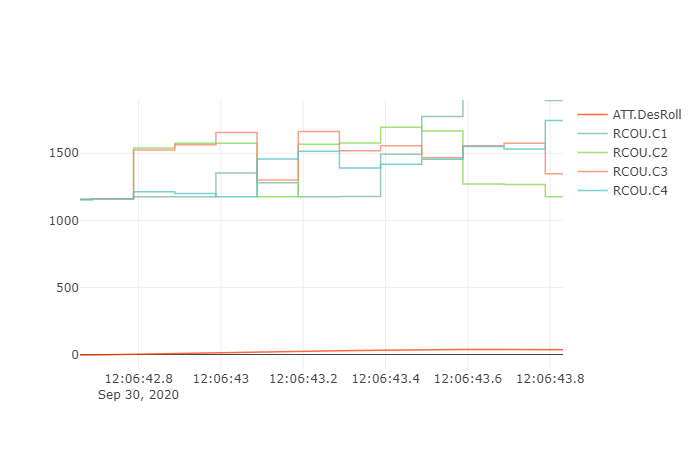
I see high values at RCOU.C1 and RCOU.C4 and low at RCOU.C2 and RCOU.C3, so it must flip over pitch axis instead of the roll. Could it be wrong connection to motors?
I have cross-checked the motor connection. I think that RCOU.C1 and RCOU.C4 values could be high because of the high desired roll values incoming from the flight controller.
I have not touched the motor connection since a very long time and I have been testing the drone with the same motor connection for more than 2 months. Had it been the wrong motor connection order, then I would have observed the same on the first day itself.
What I can see in the plot is that, at timestamp 12:06:42.688, all RCOUT had 1161 value and desired roll was -3.61. At the very next timestamp 12:06:42.788, the desired roll becomes 2.39 and there are changes in the RCOUT values.
Also, the landing gears of my drone are small, so as soon as the drone rolled a bit, the propellors touched the ground and it turned upside down.
I can confirm again that the motor connection order is perfectly alright.