I tried calibrating at home in my house and thought i might be getting some interference from my house wiring or even my steel table, but I just tried going out to a nearby soccer field with nothing within >100’ and only saw marginally better results.
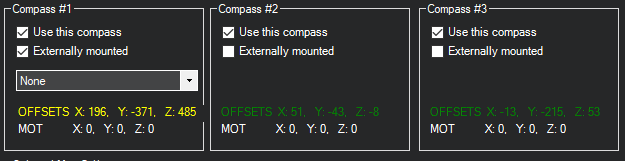
I tried looking in the arducopter documentation, but I cant seem to determine which compass is #1, #2and#3.
I am 90% positive that compass #1 is automatically the external compass; but I am wondering how the offsets could be be so much higher for an external compass than the other two (which I assume are internals) especially considering how high off the frame it is mounted.
Are these numbers typical? They seem high to me. Am I missing something? Do I need to make a grounded shield underneath my HERE2?
You are right, compass 1 is external. Aside from the offsets being high, has it not been performing in any of the GPS/compass modes? Ie: loiter, rtl, and auto missions? If it’s still functioning ok in those modes then maybe it’s not an issue. Could it be the external maybe has an issue as well? Do you have another external you could try? I’m running a ublox m8 and the thing is Rock solid. GPS maintains a 2’ radius at all times and never strays…which is miles above my older ublox that was about 5-10 meters
Unfortunately, i wasnt able to fly before the 2019 Cubes were grounded, so i dont know how it performs in the air. My old APM2.6 quad is rock solid with and older GPS and its offsets are much lower.
What kind of offset numbers are other people seeing? Obviously it varies with setup and frame, but I am wondering if this is typical with the Here2 GPS (which I believe is an M8N…dont know which mag chip it uses, though)