The Problem which I am facing right now is after arming the system after certain period it topples itself. I am not using any RC with it. I was using mavproxy and dronekit to fly the system. I don’t know why it happened So, any guidance will be appreciated.
The typical problem is that the motor order is not correct. Or the orientation of the flight controller is not correct
Had a look at your log files but cannot find the ‘topple’ event you are describing.
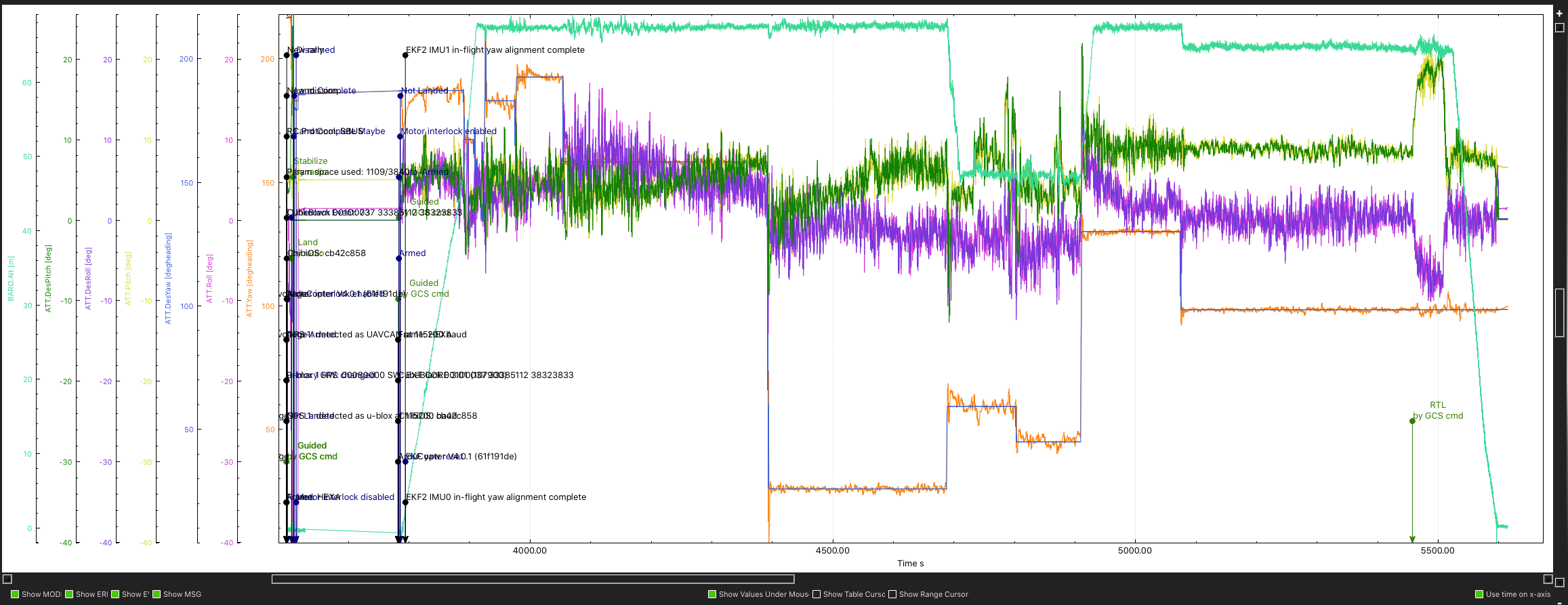
This is the flight it shows up to about 70m
Your PID’s are all still at default and the Desired v Actual shows this as well.
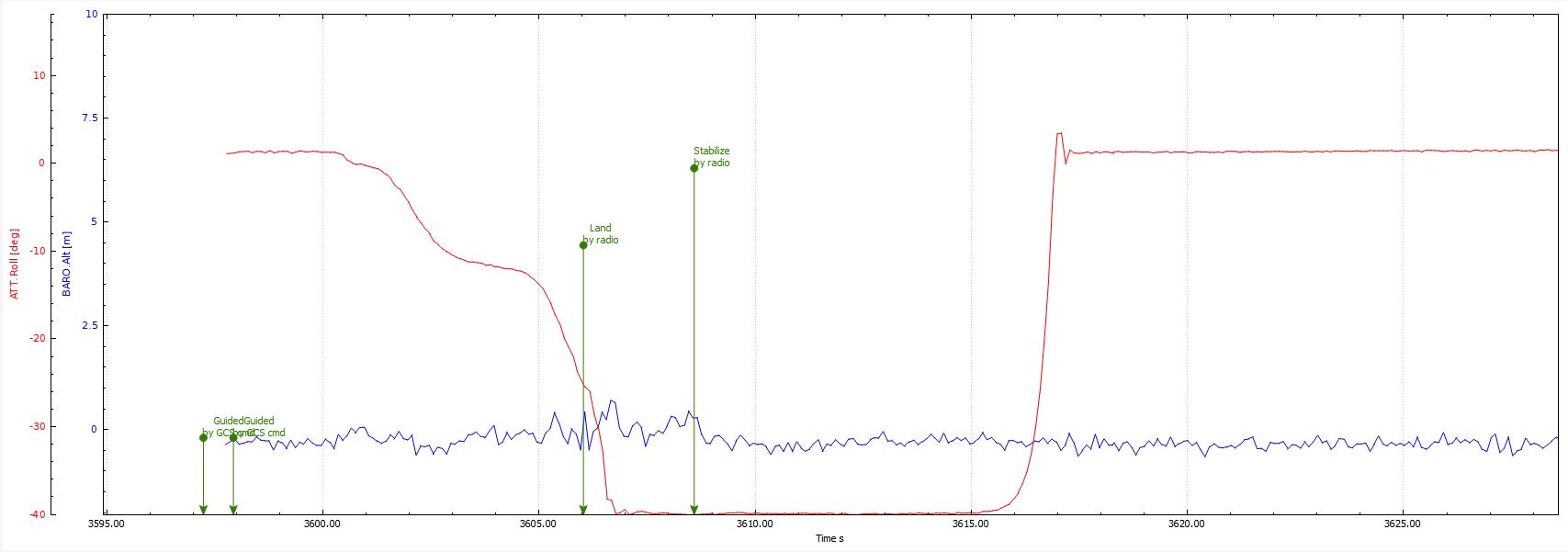
Is it this event during the 1st Takeoff attempt? It looks like you Armed, gave it the Guided command and then the Takeoff command which is right. That flying location looks like remote desert, was it stuck in the sand? Perhaps the takeoff wasn’t aggressive enough.
we are flying in desert but using a platform to prevent any issue due to sand
Try increasing WPNAV_ACCEL_Z for a more aggressive takeoff in Guided Mode.