Hey Guys i have a yaw problem that happened out of no where. When i takeoff in loiter mode my hexacopter yaw turns to the right slowly. I turn it back to face straight and it goes back to turning right. I thought it was my motor 2 problem so i replaced it but did not do anything. I made sure the arms were all even and level. Here is my bin file if you guys can help me. Thanks
Servo outputs (to motors) look good, so you got the motors aligned nicely.
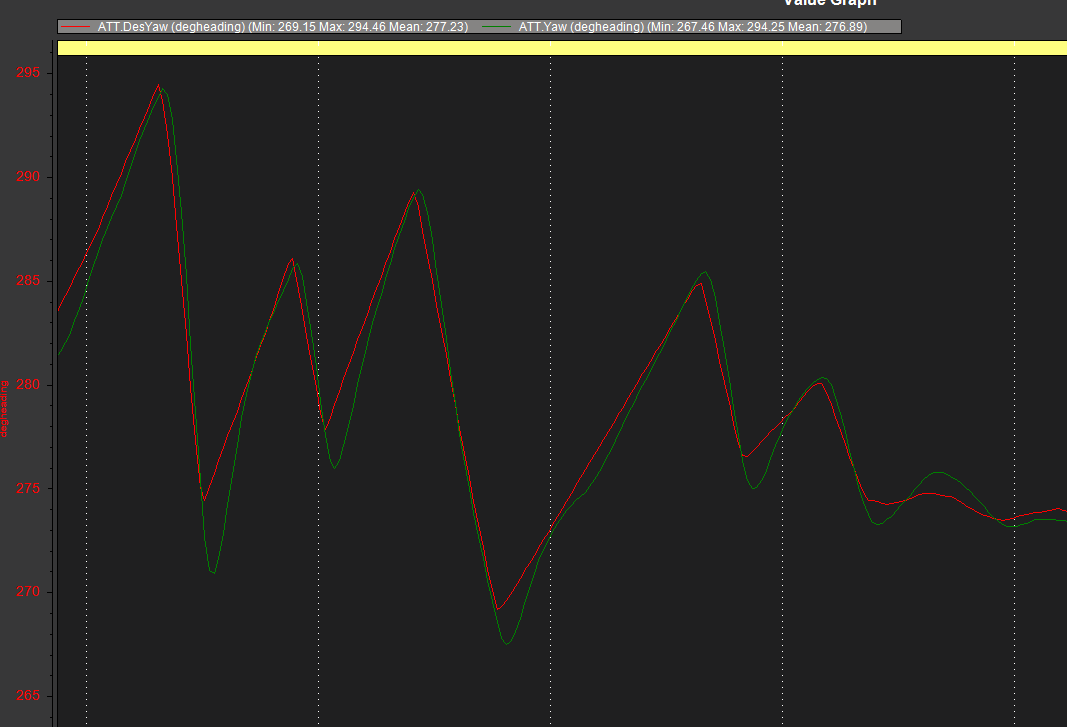
Desired Yaw is leading Yaw, indicating the hex is doing what it’s told.
You have
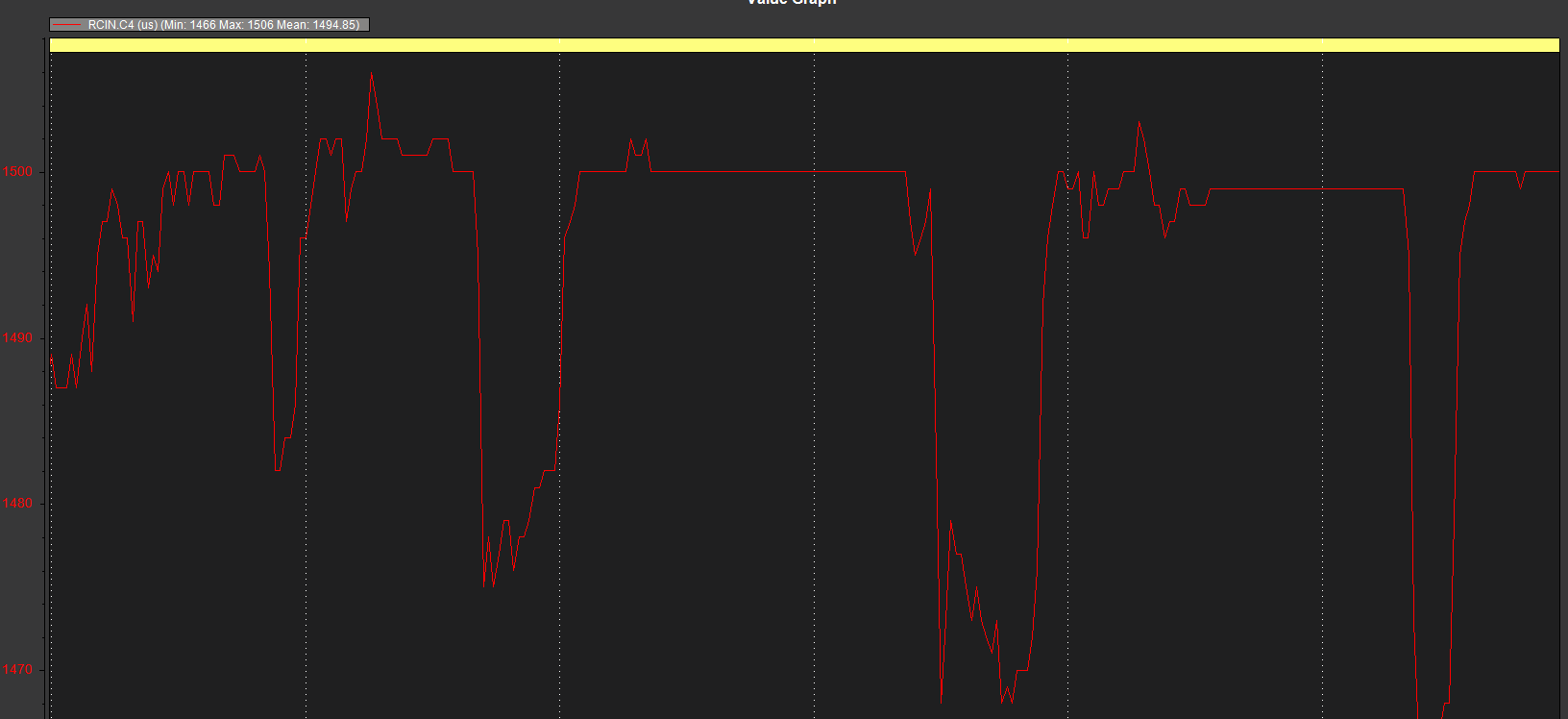
RC4_TRIM = 1495
RC4_DZ = 0
but that actual RC shows the centre point around 1500. Change the deadzone to 20 and also RC4_TRIM to 1500 (or redo the RC calibration procedure)
You’ve got a lot of default values - you might want to use the Initial Parameters plug-in by pressing Alt A in MissionPlanner, set up Harmonic Notch Filtering then run Autotune.
Hey Shawn thanks so much for looking it over the bin file and getting back to me. Ok i will try a new rc calibration, running autotune and i will get back to you. Again Thank you