I have a hex running the latest apm on a pixhawk 2.1. It has done a number of things to me when trying to get it off the ground. From the whole thing spinning upon takeoff, to a complete somersault into the ground. I have double and triple checked my motor rotations and re calibrated everything. Is there something I am missing or should try next?
Is your autopilot been in use on other copter before? (other copter remaining’s in AP)
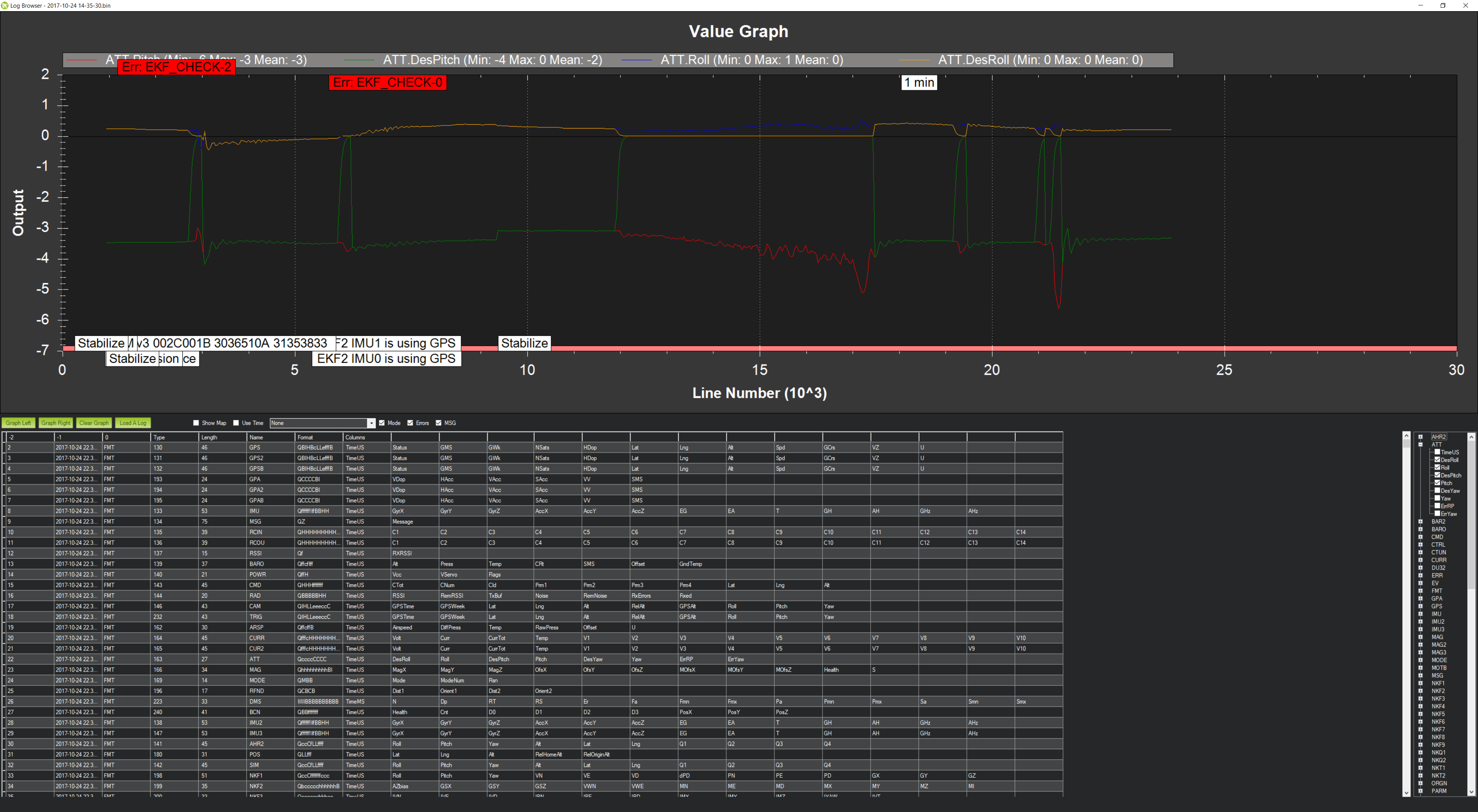
I noticed Desired Pitch and Pitch are not following well. Is this high or low value in scale, that I don’t know.
Never flown before. I’m just trying to get it into the air so I can start an autotune. I did just find that I had my AP configured for a 180Yaw which is not needed which may cause some error. Going to Test now.
Results: Success. Level flight. Now on to the much needed tuning.
Hi all
I am facing the similar problem. I somehow couldnot take-off the copter and it toppled even well before it could take-off from the ground. Can anyone help me analysing the issue. Here is the log.