Hi all,
I moved the copter from one location to another (Germany-Sweden) for field tests. Copter was flying fine in Germany (all tuned), but when I did a flight test in Sweden I observed some vibrations which I would like to ask your opinions on it.
I did all the calibrations before the test. When the copter was flying, I realized that I forgot to update the ACCEL parameters (i.e., ATC_ACCEL_P_MAX, ATC_ACCEL_R_MAX, ATC_ACCEL_Y_MAX) which were adjusted for the payload attached, however I removed the payload to just check the performance of the copter. I landed and updated the ACCEL params (however, I did not restart the copter) and then took off again, but still the copter did not perform well, the vibrations were there.
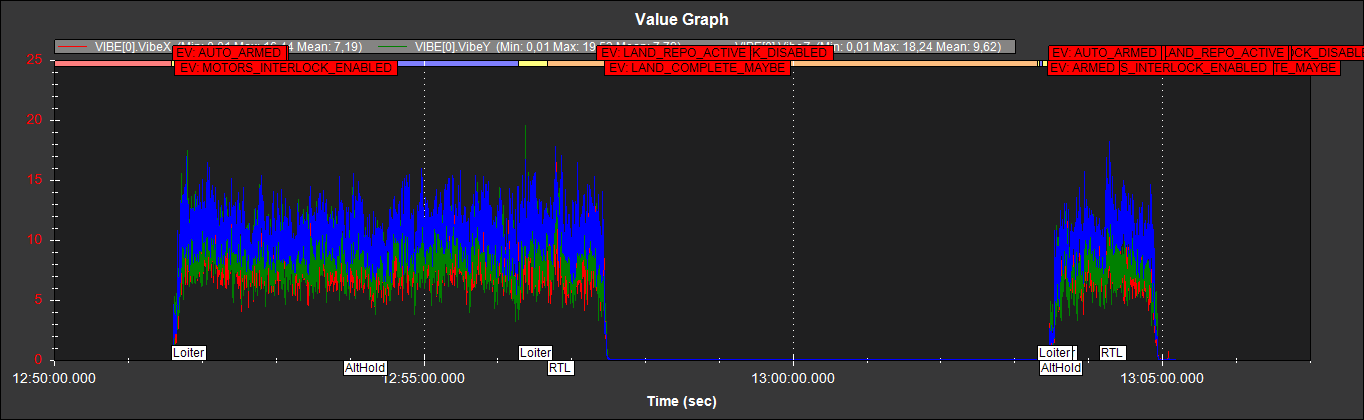
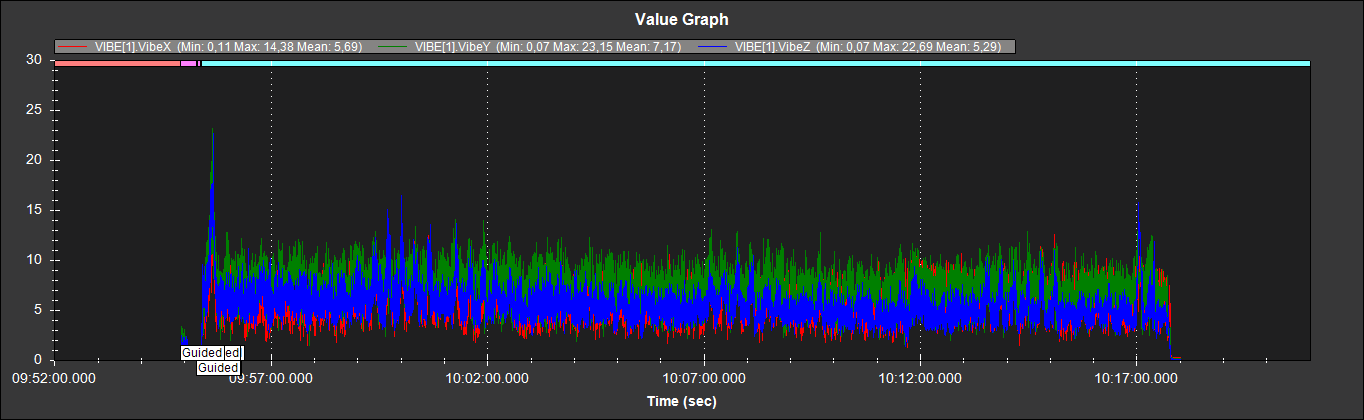
I checked the vibrations but seems not so much different from the flights in Germany, below first graph shows the vibrations from test in Sweden and second is from Germany, both seems to be below 15
Then I checked motor outputs, seems that the differences is a bit bigger in Sweden (first image) than Germany (second).
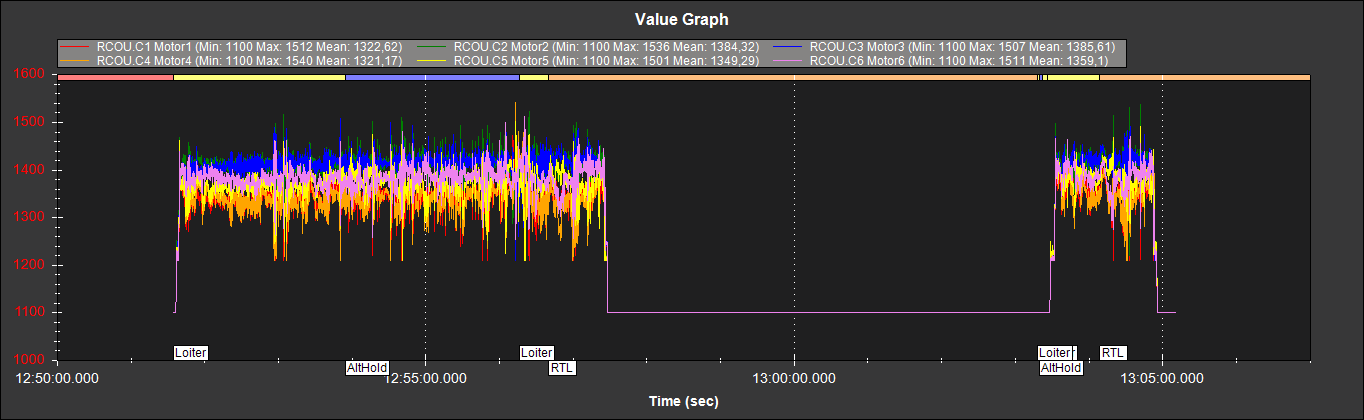
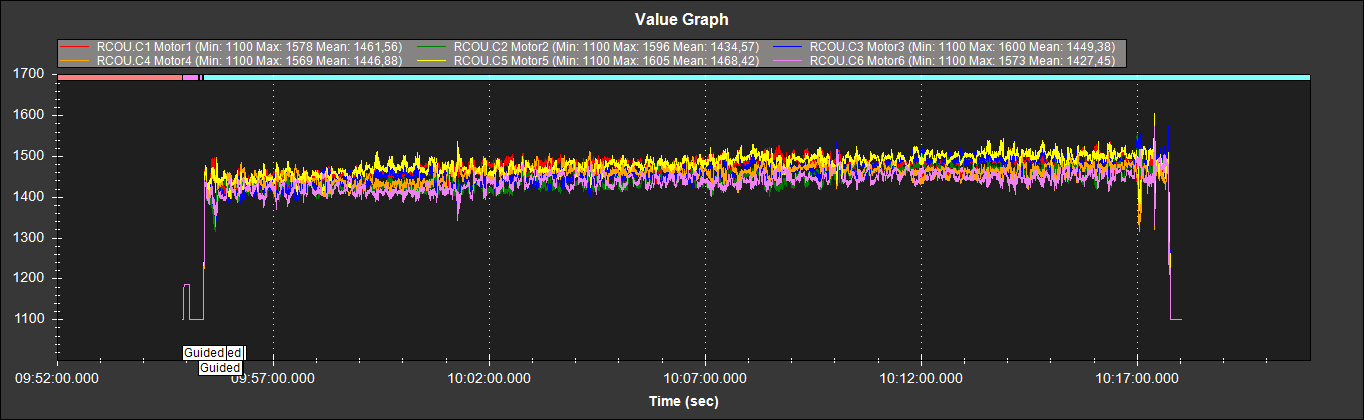
I am not sure why the motor differences are a bit bigger compared to Germany case, The wind was a bit higher in Sweden but I do not know if that can cause that much of a difference. Could it be because of the restart, do I need to restart the copter whenever I change any parameters? I would appreciate any help.
Here, you can find both logs
https://drive.google.com/drive/folders/1nCXdRaOO1M2_eHn6AsQ9IeandXcps-PP
Best regards