I just had my third crash and thought it may be the time to ask for some help.
I’ve done some research but i couldn’t find the answer.
So I have Hexacopter with Navio2 board on a Tarot frame. All calibration checked. esc calibrated. Center of gravity checked.
On the first maiden flight I had a hard time to land because it oscillates up and down and can’t get it to come down nicely as I would do with DJI Phantom 4.
I think there are more things to be adjusted apart from the hover/throttle issue, but I think if I can get it to hover and land it slowly then at least I wouldn’t crash the damn thing anymore.
I was looking at my RC 3 in and out channel and my RC3in (throttle) doesn’t seem right. It’s like a switch. if I give it a little then it shoots up and take away a little then it cuts down so much input.
Could someone please take a look at my log and find if there is anything wrong with my throttle setting?
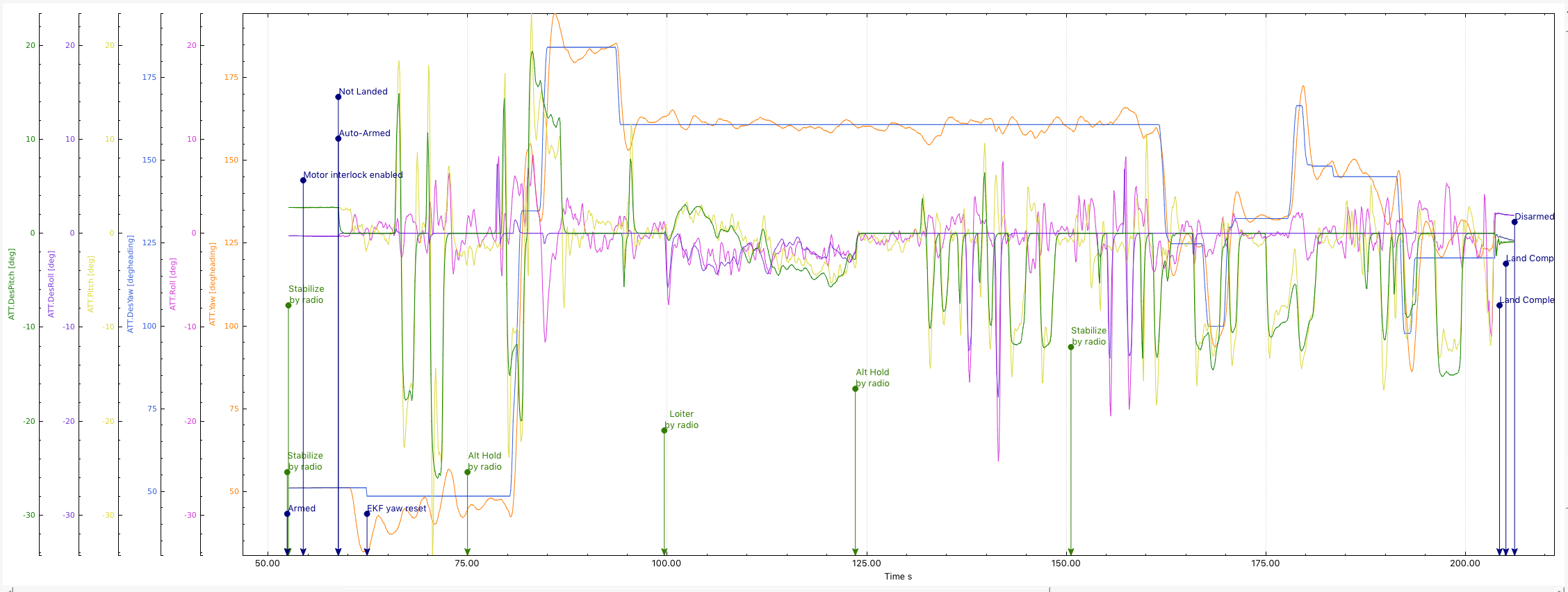
You seem to have peaks of high current at times when the alt is dropping fast which is curious.
Do you have the barometer covered in foam?
or otherwise protected from sudden disturbance?
Thank you for the response. I’ll drop the PID’s to half of default and try to balance the copter before next flight. How do I know if my copter is balanced? Am I looking for RCOU.C1 to C6 to be consistent with each other?
I do have the barometer covered in foam. I’m thinking it is caused by me trying to gain altitude. One thing i noticed was throttle at mid position, copter gains altitude. should I add some more weight to hover at Throttle mid?
No weight needed, just some MOT_parameters changes.
MOT_THST_HOVER 0.4259342551231384
MOT_HOVER_LEARN 2
Set MOT_HOVER_LEARN at 0 (disabled)
Then fly in Stabilise mode. If to maintain constant altitude, your throttle lever is below middle, reduce MOT_THST_HOVER by 10% (Increase it if lever is above middle).
When the altitude is steady with lever at 50%, you are a happy man and can try to fly Altitude hold or Loiter mode. You will not experience sharp altitude change when switching from theses modes to stabilise.