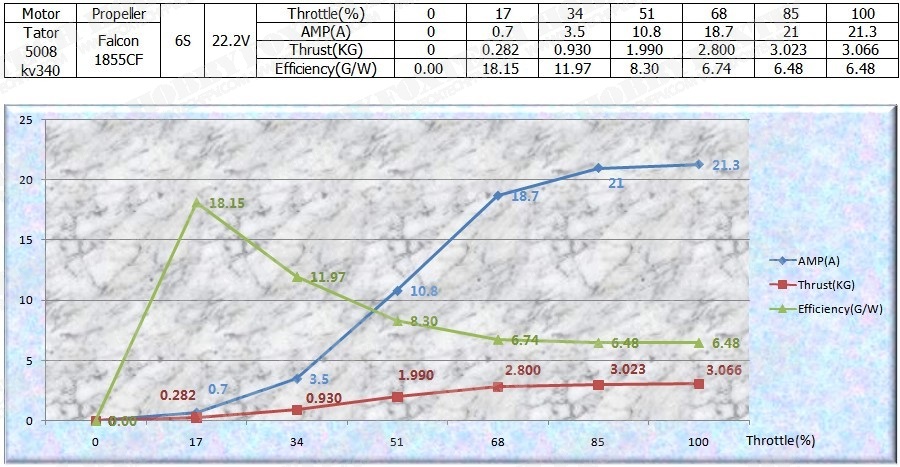
We are trying to get a Hexacopter (Tarot X6 frame) with a Pixhawk Cube Orange+, Arducopter v4.5.1, Castle Creations DMR 30/40 ESCs and Tarot 5008 KV:340 motors, 18in CF props, in flight condition.
The only thing that is non-standard, is we have a 2 ½ ft (0.76 M) carbon fiber pole, standing upright, mounted to the center, on top of the frame. This will eventually hold a wind sensor and the pole + mounting equipment weighs 1.2 Lbs (0.54 KG).
We have attempted multiple flights inside our outdoor cage and each time we take off in Stabilize mode, the UAV would roll over to the right. Things we have checked so far.
• RC is calibrated
• ESCs are calibrated
• Autopilot orientation is correct (verified through setting and by tilting it and confirming on mission planner HUD)
• Compass orientation is correct.
• Fame type is set to X and Hexa (verified motor assignment and it is set up for X and not CW X, X is what we want)
• Motor rotation is correct
• Props are mounted correctly for rotation and not upside down.
• Motor spin test (without props) and manually tilted the drone on the roll and pitch axis, to ensure the autopilot reacts appropriately (used graphing function on the channels to confirm).
• Motor spin test (without props) in stabilize mode. Used RC input on roll and pitch and confirmed with motor spin and graphing function that the motor were reacting appropriately. This also confirms that my RC channels are not inappropriately reversed.
• Checked CG on craft with the weight only varying 0.03 Lbs (0.01 KG) on a 21.63 Lbs (9.81 KG) vehicle.
• None of the PID tuning parameters have been altered, they have been left as default.
I’ve worked with UAVs professionally for over 11 years and have never had this much trouble with a drone. We thought after the first two flips it might have been too light (forum posts suggest a 10-12KG MTOW is fine) and was getting knocked around by the wind but this last roll over, I added a 5 Lbs (2.26 KG) counterweight and it reacts the same. Any advice would be appreciated.
Both of these tests are invalid and produce invalid results. Do not do that.
Use the mission planner motor test, to determine if the correct order and direction is set. That is the only method that reliably works and delivers correct and valid results.
I did the mission planner motor test to confirm rotation, but I will argue that the motor test will not show how the autopilot reacts to the body being tilted.
Also a motor test will not show how the UAV reacts to RC inputs.
Where are you getting this 3kg number from? I am curious because I have only been able to find hear say from past forum posts on MTOW of a X6 with Tarot 5008 KV:340 motors.
Ok trying to make sure we are on the same page here.
I did use the motor test to verify motor order and rotation.
I used stabilize mode for my “tilt test” where I raised the throttle to about 20% and lifted one side of the drone to simulate a wind gust. I then monitored the autopilot’s response (visually through the motors rotating faster or slower, and by real time graphing the signal out to the motors) by changing motor speeds in attempt to level the craft.
I used stabilize mode for my “RC test” where I raised the throttle to about 20% and used the RC to adjust the roll and pitch. I then monitored the autopilot’s response (visually through the motors rotating faster or slower, and by real time graphing the signal out to the motors) by changing motor speeds in attempt to level the craft.
Hmm so if I understand correctly, motor test will send unmodified thrust values to the motors you want, without the autopilot attempting to alter it due to the UAVs attitude.
So this method would be good for testing motor assignment and rotation. Would this also be a good way to check that I properly calibrated the ESCs?
I probably didn’t communicate this properly but I do understand that by doing my tilt and RC test, that its not perfect because the props are not on so the response the autopilot is expecting is not there. The part that I’m confused on is, did you mean there is more I can test with the motor test function that I’m not seeing?
Also, I really appreciate you input on this issue.
I would re-re-check the correct turning orientation of the props ( not talking about being upside down but that there are props made to turn left and others to turn right.
I recently setup a quad using Castle ESCs (different from yours) but also had the vehicle flip over. The fix was to configure the ESCs for “multirotor” mode using the Castle software. Perhaps check if your ESCs have that option.
Check the motor outputs are the correct order. I had the same problem with my Tarot 650 frame. The pixhawk outputs are different to the tarot. Hope this helps.
My rig is tarot 650 frame with dji 800 motors, 15 " props and pixhawk 6x
{kind=link}