I’ve been testing this S550 hexacopter for battery duration, simple missions - t/o, loiter, RTL.
All seems well. Until yesterday when I had series of flights one after another, I noticed in the logs I started getting “EKF3 IMU1 MAG0 In-flight Alignment complete” messages with no issues in flight. Then the last fight I took off flew around in Alt hold and loiter when the Hexa started to drift and yaw CCW >90 degrees. Happened unexpectedly and ended up crashing with little damage fortunately.
I flew today and noticed this yaw and drifting issue twice. Luckly I was able to switch to Alt Hld - reorient and land. I also was able to fly my simple mission described above so GPS must be OK.
Would Like some help to solve the issue. Logs attached.
Had some time this afternoon to fool with the Hexa. Ended up in the tree. Took a look at all the wires and anything else that I could see that might cause a problem. I tightened the GPS antenna stalk and recal the accels and compass.
I also loaded up the params from the last good flight I had. Not sure what happened but I had a number of good flights with no drifting away issues. Was confident enough to try a short auto mission.
Anyway I hope this is fixed. If anyone could look at the logs that I provided above and identify the issue I would be grateful. That way I can be more confident of the fix.
I suspect there is something going on with the GPS or compass
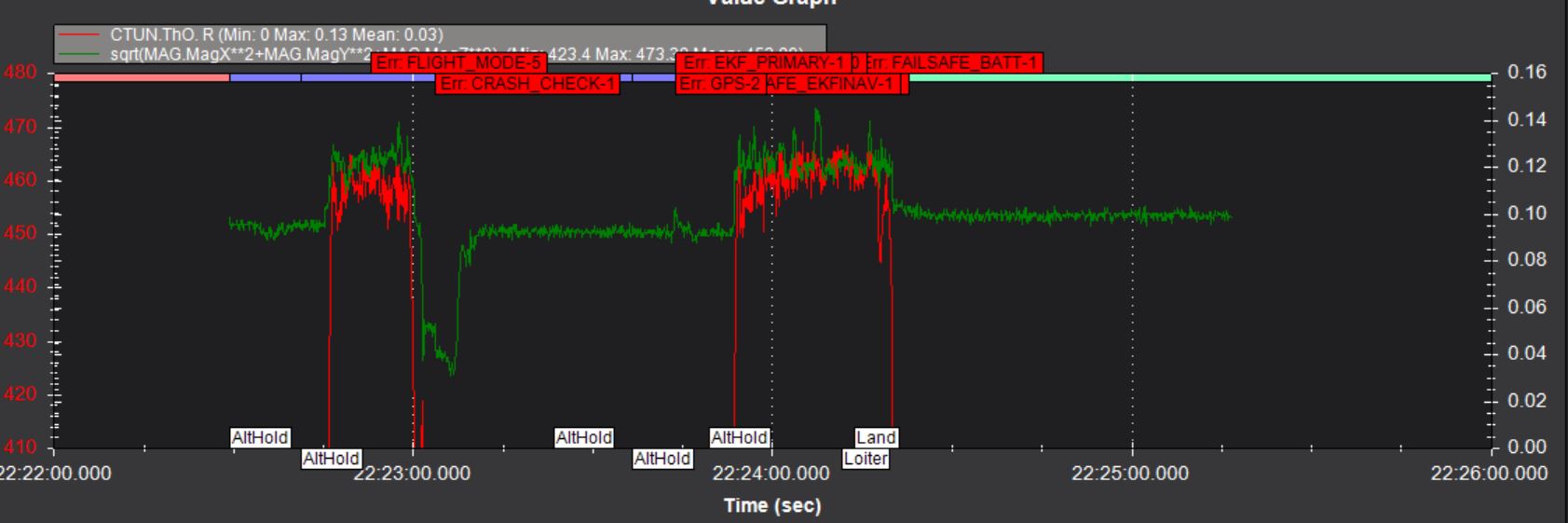
How do you do Sqrt of the mags in the graphs? What would a good graph be - Green straight across with no correlation to the CTUN_THO_R? So I can check my changes.
My GPS must have the external compass. Its on a 6 inch stalk like many kit multicopters, to relocate, add more isolation could I just a longer stalk, and is there shielding I could add to the ESCs? I suspect the chinese kits may use generic GPS antennas, could you recommend a better GPS antenna I could purchase that would have better isolation built in?
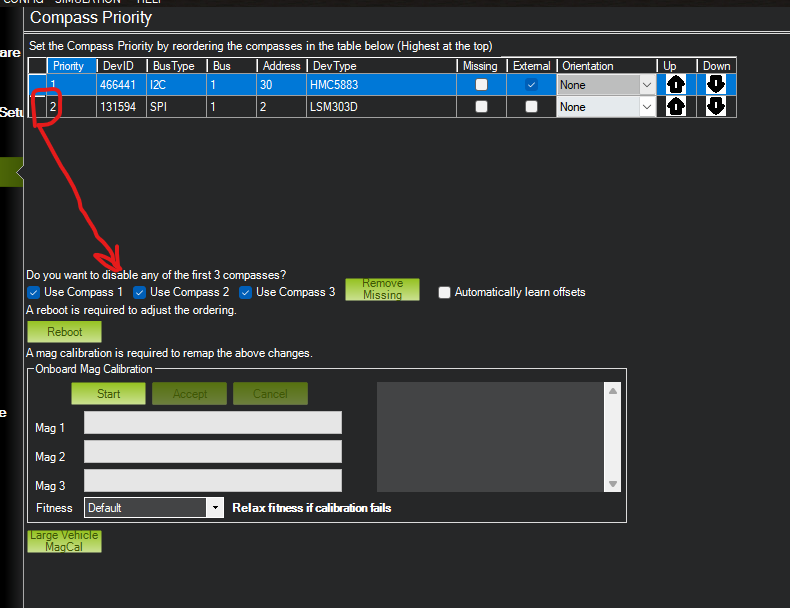
Do I use this compass setup page to disable the internal compass, in my hexa it looks like there are only 2 compasses, and external pri 1 and the other must in internal pri 2. So I would disable compass 2 using the check box and recalibrate?
On the graph screen there is a pulldown menu with a lot of special graph options. You will find it there.
Yes, disable the internal compass there.
I would do that and make some more flights for review before changing the hardware.
I made the change to use only the external compass from the screen shot, Rebooted, Recalibrated the one compass, rebooted.
Did a test flight to 1m and about 5 seconds into the flight the Hex turned slowly 90 CCW so I lowered the throttle and landed. I took off again to about 1 M and this time when the Hex started to turn CCW I flipped it to loiter mode and the hexa make 1 complete turn so I flipped it to RTL and it continued to turn CCW maybe three turns at 1 M agl. so I grabbed the landing gear and held it until it shut off.
This makes me think the External compass is not working. The System with an external and internal compass must be selecting in my case the internal compass even tho its not primary.
I wanted to go back and test with two compass like the last good flight and see if its stable. Then look at the internal and external mags and see which one is messed up. Then I would like to test with another GPS antenna (and its compass). I have an old GP antenna on a stalk from 4-5 years ago.
I wont have time till later this week.
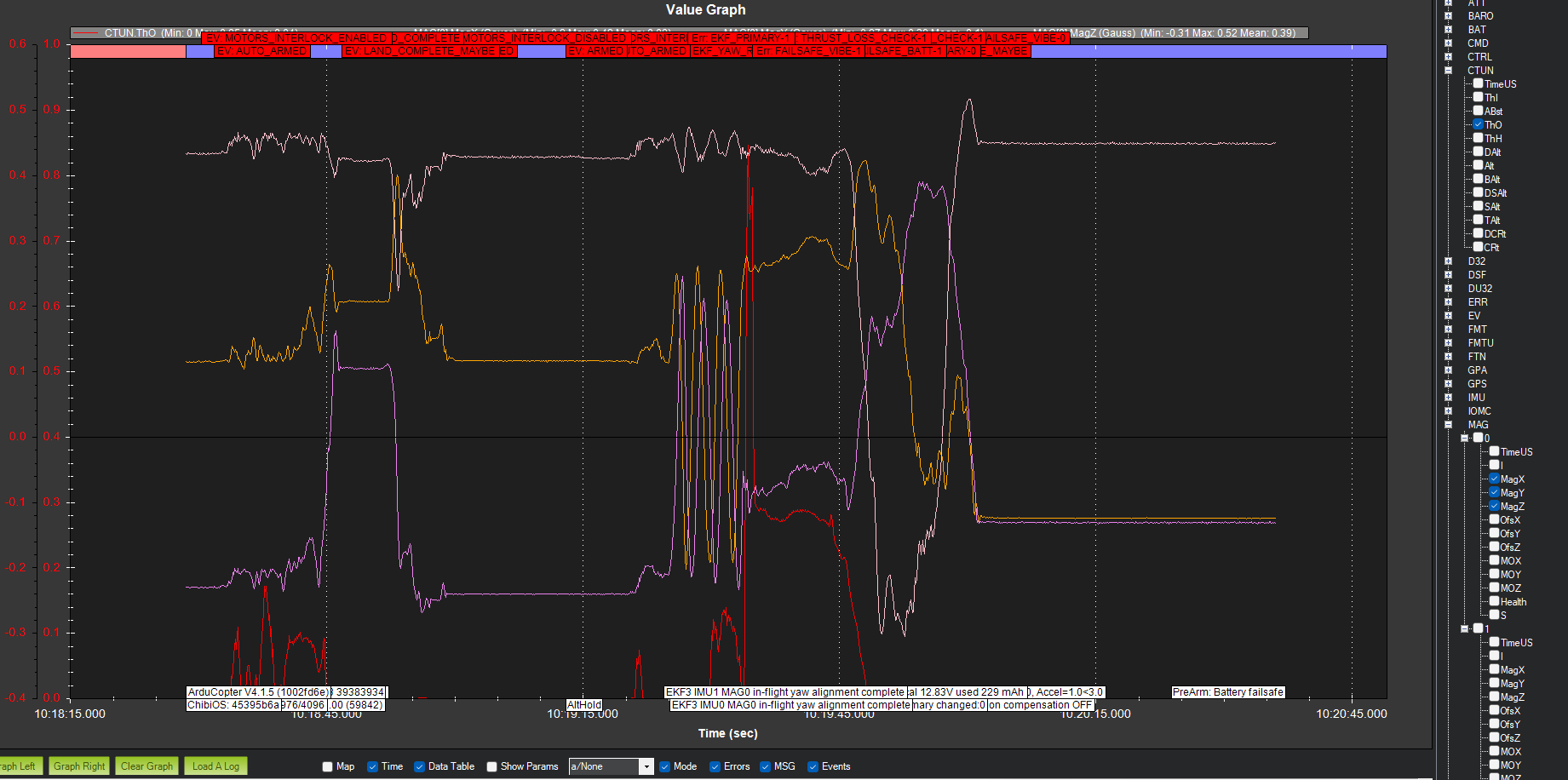
Whats your opinion dkemxr, Graph of Throttle and MAG0 XYZ. First bump is the TO to 1 M and an uncommanded 90 deg CCW turn and land. The second is the TO to 1 M uncommanded CCW turn, Loiter and RTL with three turns and me grabbing the landing gear.
If there is other data to check LMK and I can try to upload the files.
Well, I went back to an older param file way before I started having troubles. I also installed a new GPS/Mag sensor. (I now can see 20 GPS Satellites, before 10 seemed typical). Recal Compass and accelerometers. And it flies OK. I tried the initial param set up for a 10 inch prop 4S lipo and things became squirrely. So I reverted back. I ran a couple missions - TO - turn to a heading - loiter time - RTL and TO - Loiter time for ever - RTL.
Those all seem to work. I think I will try to auto tune tomorrow if I can find a larger field.