Pitch and Roll is still a little off. Although Pitch is better than Roll
I see you did the AT at .05 you could do another at .07
You still have a vibration issue with some clipping
How is your flight controller mounted?
Pitch and Roll is still a little off. Although Pitch is better than Roll
I see you did the AT at .05 you could do another at .07
You still have a vibration issue with some clipping
How is your flight controller mounted?
@smartdave my flight controller is a cube mounted to the Kore carrier board. The cube is vibration isolated so it is recommended to be hard mounted to the frame. After the second crash and seeing the vibration issue i added rubber mounts below the carrier board similar to what @xfacta has shown above. I am going to remove them and see what the vibrations look like. I am wondering if I have a slightly bent motor shaft from a crash that I am unaware of. Tomorrow I am going to look at my original log before the first crash to see what the vibrations looked like. I did not have the rubber mounts at that time either.
I’m inclined to suggest setting Roll PIDs closer to Pitch since that’s working well:
ATC_RAT_RLL_P,0.1
ATC_RAT_RLL_I,0.1
ATC_RAT_RLL_D,0.008
And probably lower
INS_ACCEL_FILTER,18 (or 15)
Increase you Autotune aggressiveness, as Dave said, and do a Yaw Autotune. See how that is, then probably do a Pitch/Roll Autotune.
Once everything’s getting close to being right, you should be able to set AUTOTUNE_AGGR to 0.1 and do all axis.
Lower INS_GYRO_FILTER too if you’ve got to, but that would be atypical.
This is what I use to mount my cube FCs with. Works great
Kyosho 3mm Thick Vibration Absorption Sheet for RC Drones/Quadcopter/Gyros https://www.amazon.com/dp/B0188Q253M/ref=cm_sw_r_other_apa_i_L-4UEbJ8MYR9E
Hi Dave,
Do you use small blocks of that under the FC, or do you use a big slab of it in one piece?
I use 4 small squares under each corner
i would suggest - if you use latest code where it is supported - activate the dynamic notch filter. it makes a significant difference. review instructions in the docs, what i have now on my 680 tarot is shown below - i run older ESCs there with no telemetry, so it is driven by the throttle.
INS_HNTCH_REF,0.14 is set to the level of the recognized MOT_THST_HOVER,0.1303587 - my bird is that overpowered right now.
it reduces vibrations down to insignificant level.
INS_HNTCH_ATT,40
INS_HNTCH_BW,50
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,110
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.14
all filters in all sections are set to 20hz. i did not see good stability if they are set lower than that.
Adding another update. I was able to do a few more tuning flights last Friday. I worked through the steps you guys reccomended more or less. I have not done anything with the dynamic notch filter though as @Paul_Atkin1 suggested.
Flight 1 - Yaw Autotune only and AUTOTUNE_AGGR to 0.05.
Flight 2 - Pitch and Roll auto tune with AUTOTUNE_AGGR to 0.1 After this flight the pitch and roll felt very good.
Flight 3 - Yaw autotune only with AUTOTUNE_AGGR to 0.1. this helped the yaw a lot. There were a few times during this tune where it sounded like the motors were winding up more than they should and the copter seemed unstable. I would give it a few stick movements and it would settle back down.
Flight 4 - Short flight to test the new tuning parameters. The pitch and roll felt very good and the copter responded well. It seemed to have very slight oscillations at times.
For some reason I can’t get APM Planner 2 to read my logs, I get an error message. So looking at these in Mission planner what i see there is some oscillation in the pitch and yaw still which i am afraid could turn into bad results at higher throttle values and in auto missions for mapping. The vibrations seem better. I removed the vibration dampening rubber mounts and also secured my GPS mast that had more play than i liked and is connected directly to a motor arm.
What are your professional thoughts on how the logs look and if i should pursue more tuning?
Thank you for your time and help through this. I have learned a lot.
The logs can be found here. https://drive.google.com/drive/folders/1fcfo0eFmRRTY7K5N5Nw2Zn_OoJ1JTQ4w?usp=sharing
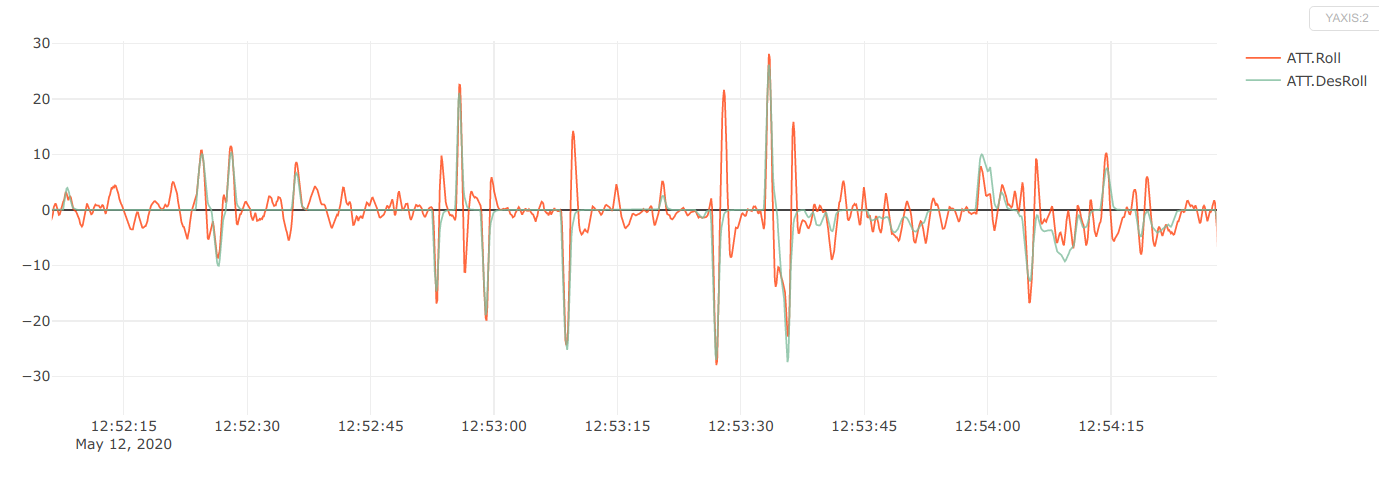
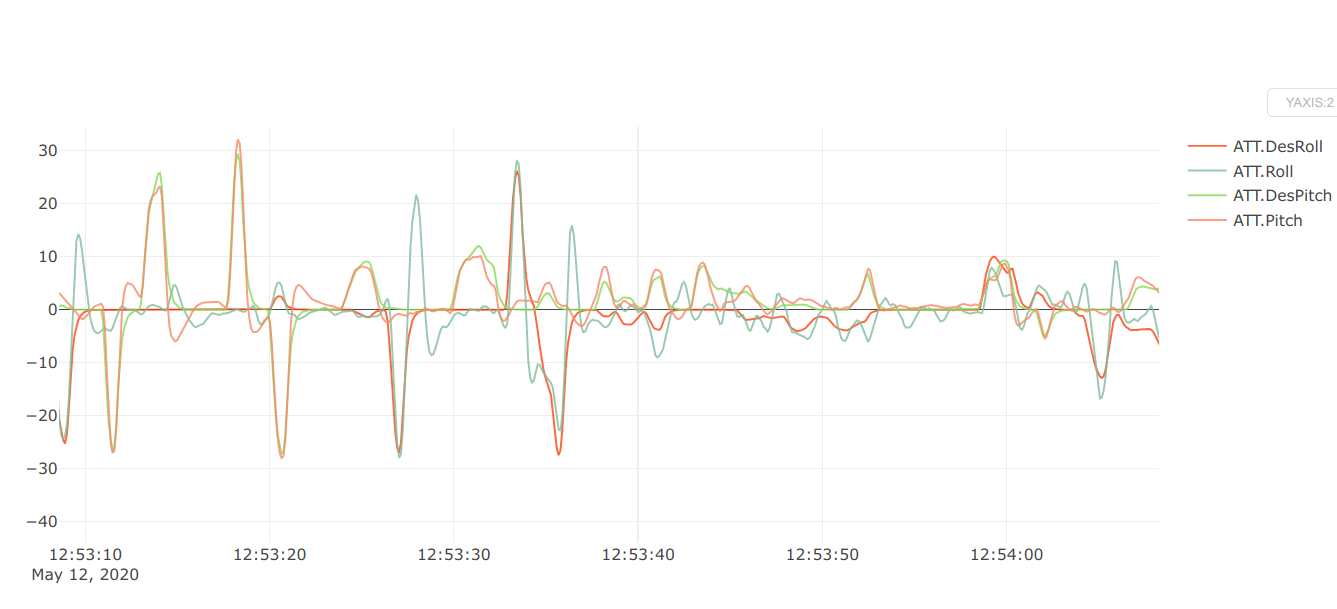
You can see here that the roll and pitch are quite snappy.
Probably a bit too snappy.
Overall its tracking well, but working quite hard at it.
I would suggest trying an autotune roll/pitch with the AUTOTUNE_AGGR a fraction lower and see how it looks compared to this.
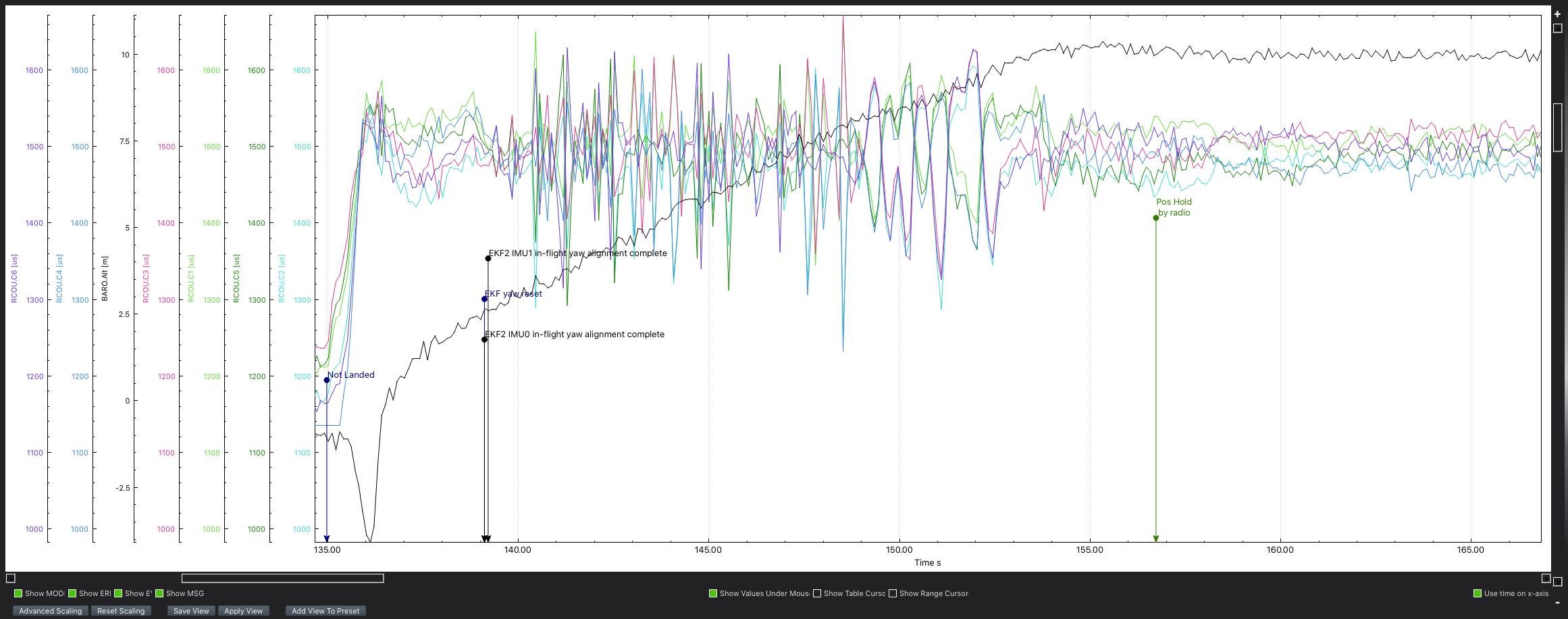
Your motor output looks very well balanced with a spot on weight/power ratio
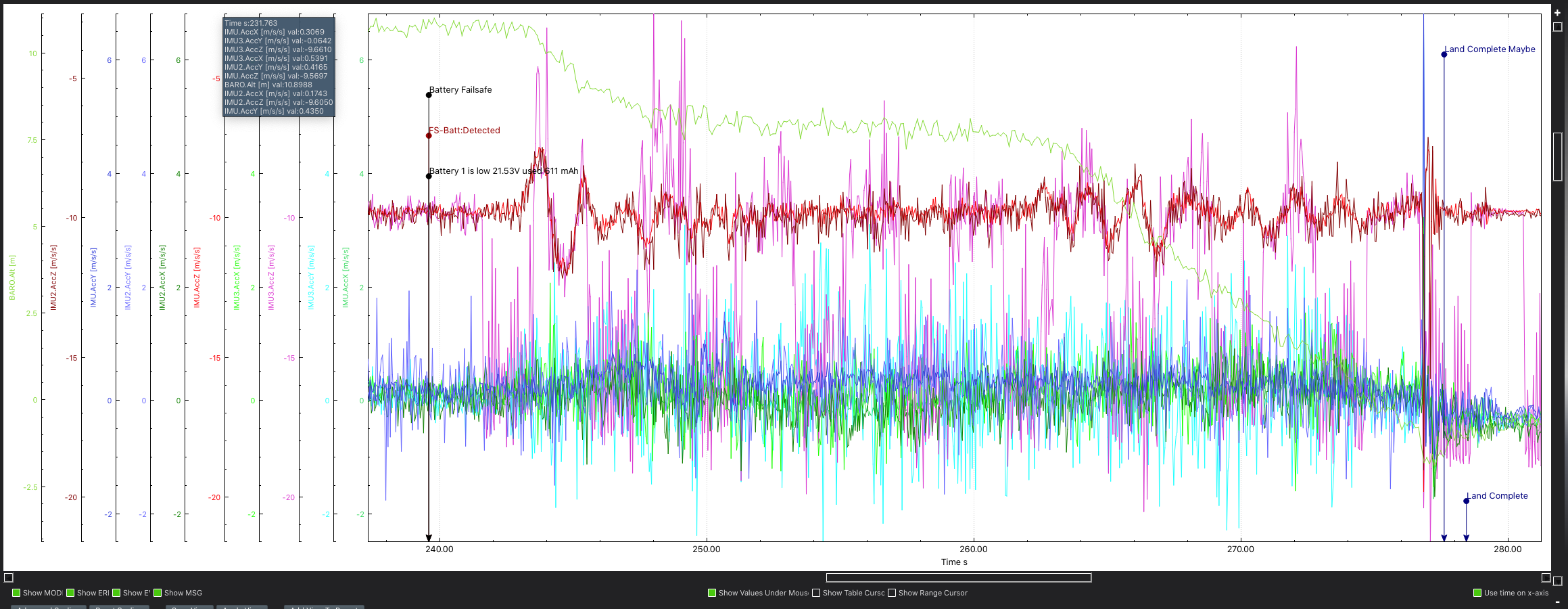
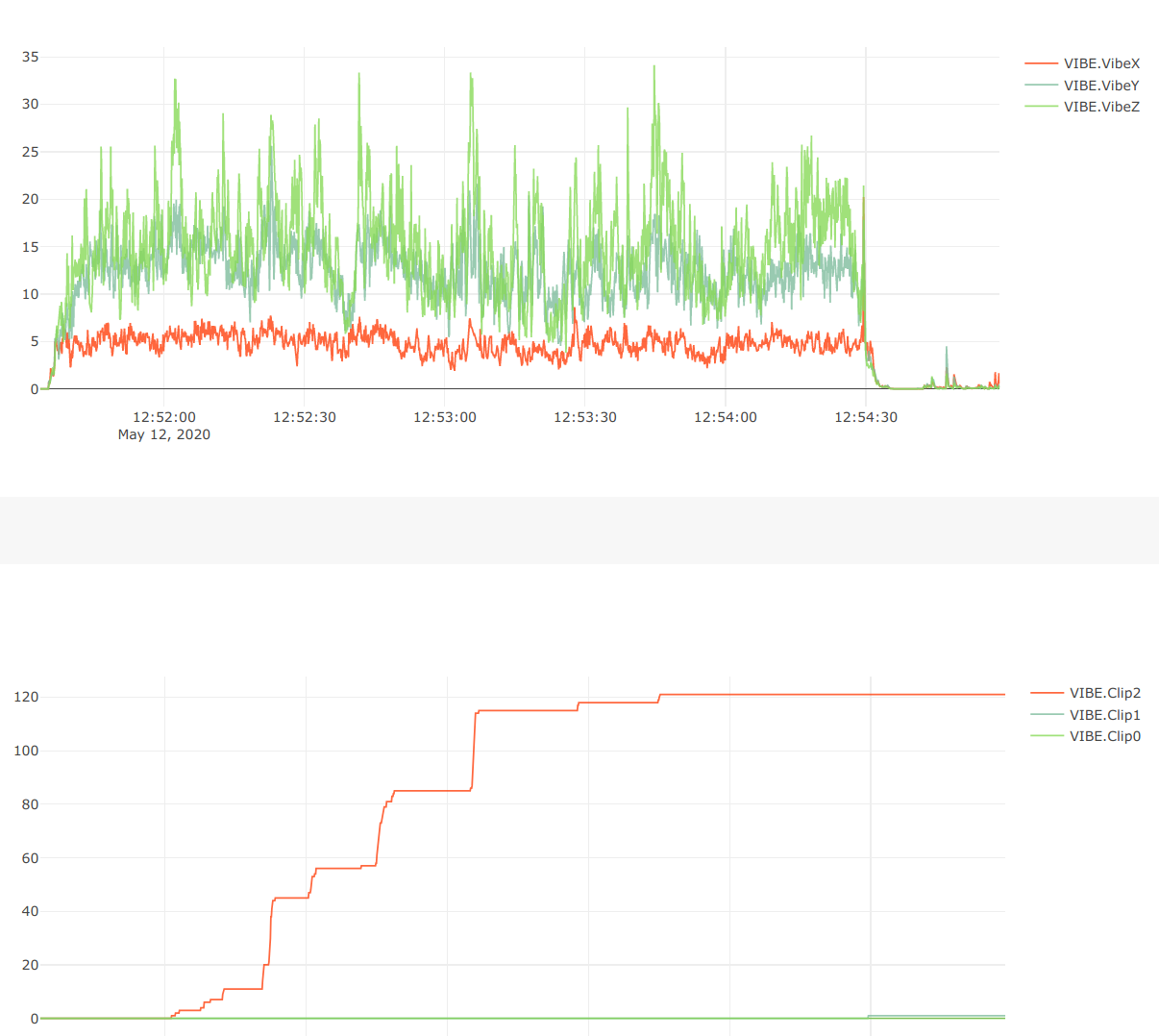
Vibration isolation looks good with the only detectable highs being in the Z in the later part of the flight.
But as this was in the decent it was most likely a bit of ring vortex it was fighting aggressively.
Getting real close to a well performing copter.
@mboland thank you for looking at the log and for your detailed analysis. I was not aware that the setup could be “too snappy” but that is something I will look out for. I will try it a bit lower. Are you thinking AUTOTUNE_AGGR set at 0.09 or 0.08 or less?
I apologize it has been a bit since my last post but i think we are very close to ending this support session. I performed an autotune on the hexa i have been having problems with and it seems to fly really well. I reduced the AUTOTUNE_AGGR since @mboland recommended this. I flew a small auto mapping mission after the tune and wondering if someone could take a look to make sure i am not missing something before i connect expensive equipment to it. The log is “Hexa_2_Post_Autotune_Practice_mission_2020-06-05 11-11-34” at the link below.
I also decided to do a new autotune on the hexa (hexa_1) i have been flying for a few years because i have learned so much during this issue. I did an autotune and then also flew a short auto mapping mission afterwards. Could you also look at this also and make sure the new tune and flight looks stable? The log is “Hexa1_Post_autotune_and practice_mission_2020-06-05 11-21-00” at the link below.
There was a 10mph wind during these flights.
I really appreciate your time in looking at these logs. I am learning more very time i dig into your responses.
https://drive.google.com/drive/folders/14U4Dhatjs5-Vwh7pSebe2TCFy6KNunmH?usp=sharing
I am seeing some vibe clipping on the Hexa 2 log still. (Hexa_2_Post_Autotune_Practice_mission_2020-06-05 11-11-34) is this something i should be looking further into? The vibes don’t seem bad as the worst is the Y and it is less than 20.