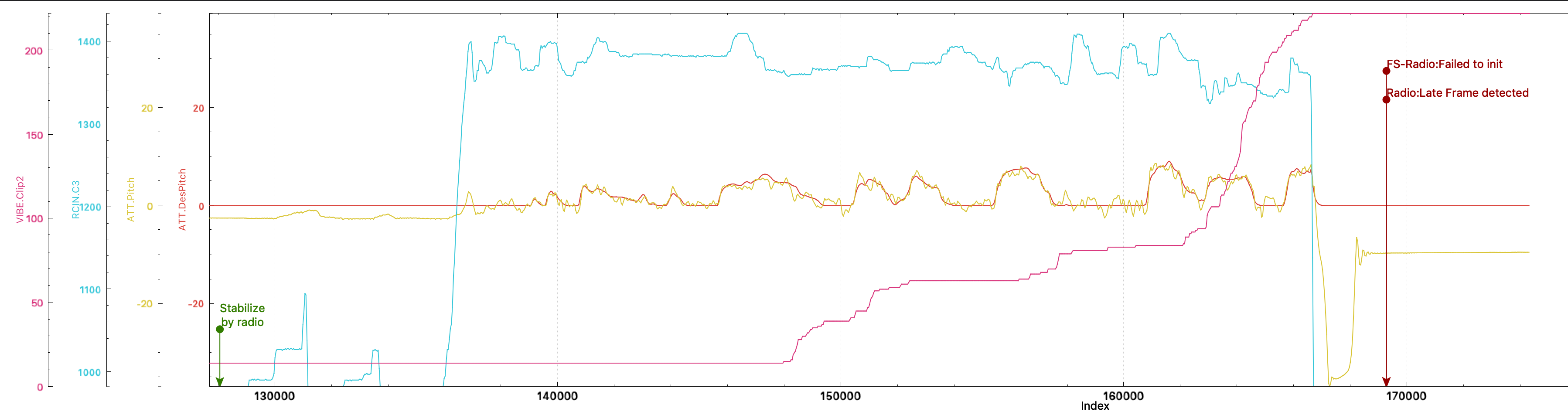
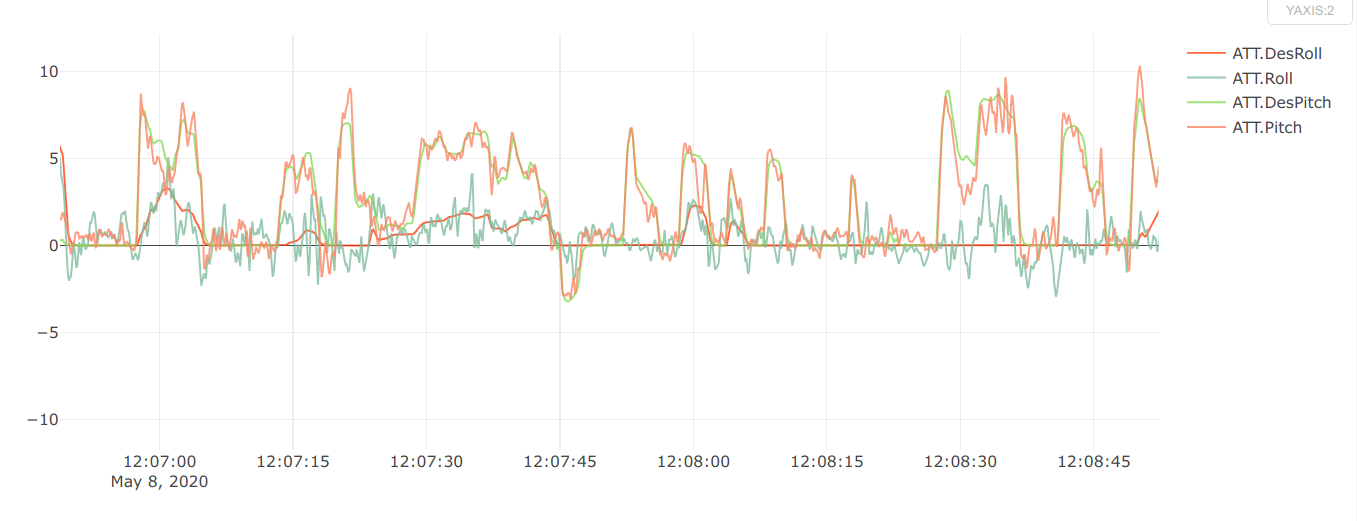
Mostly pitch is out of control.
OK I think change these and see how it flies, this shouldn’t be detrimental or dangerous:
INS_GYRO_FILTER,20 <- back to default
ATC_ACCEL_Y_MAX,7000 <-these reduced a bit
ATC_ACCEL_R_MAX,56000
ATC_ACCEL_P_MAX,56000
ATC_RAT_RLL_P,0.135 <- these matching pitch
ATC_RAT_RLL_I,0.135
ATC_RAT_RLL_D,0.0036
I think that Gyro filter setting will really calm things down a lot. Should be OK to do another test flight and maybe even move onto autotune pending that result.
As soon as you can, do the Compass/Motor calibration procedure. Maybe even disable the onboard compasses if they give any trouble.
@xfacta thank you for your quick response to this i really appreciate it, I am hoping to put this behind me very soon. I will make the changes and see how it looks tomorrow morning hopefully. I will look into the compass/motor calibration. I have never considered it because i have an external compass, but reading about it it sounds like it wouldn’t hurt to do.
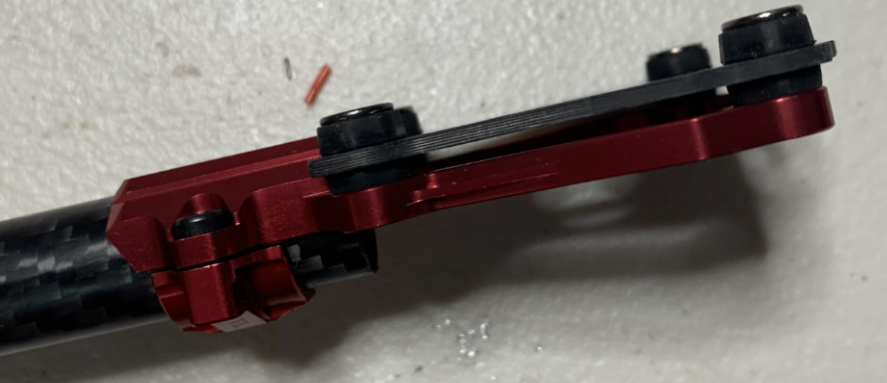
I have found that on the 680 and any other mutilrotor that has 16mm arms, these motor mounts works great. The have vibration isolation grommets between the carbon plate and the shell
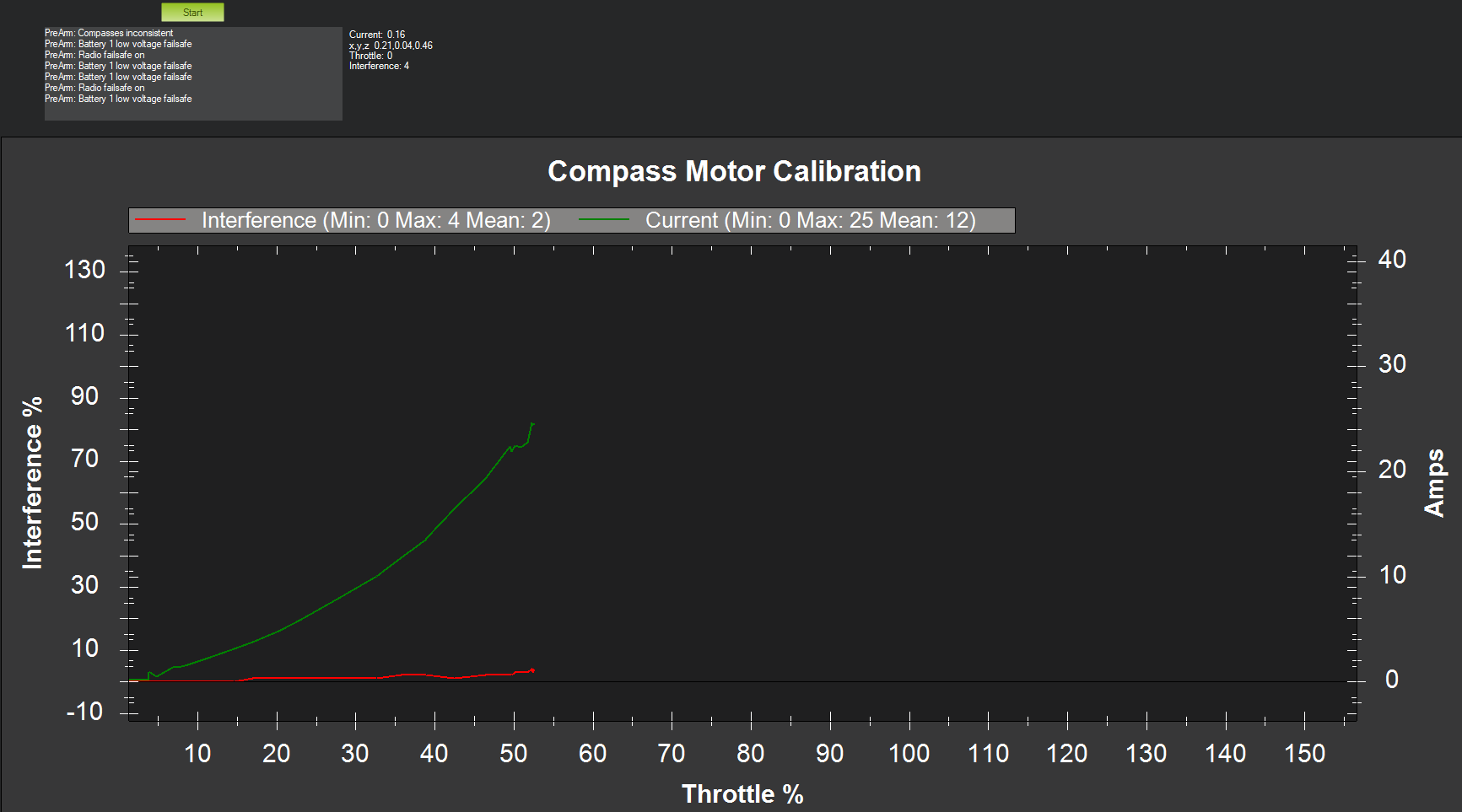
Just did the Compass/Motor cal and the results are below. I managed to keep all of my fingers ;). I will say it was a bit scary. If i am reading it right it looks like i am ok.
Also, checked IMU’s and they look ok, no sensor problems over there.
I don’t think it is ready for autotune yet. I suggest adjusting the tuning parameters as recommended by Shawn and let see from there. I think you should continue manual tuning till it is flyable then go for autotune.
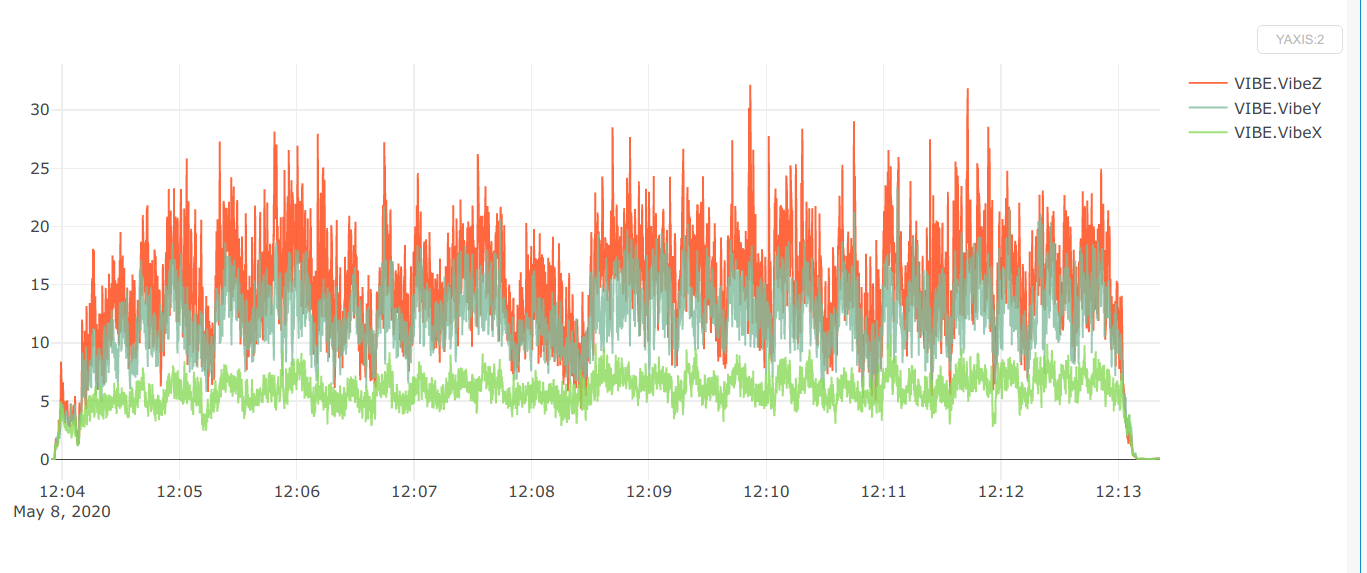
small note, did you inspect the frame carefully? everything is firm and locked, loads are evenly distributed? that high z-axis vibration is scary. I’m sure you an experienced builder just a reminder.
@Mark57 thank you for the analysis. I am confused why I am getting such high z vibrations. I have looked over the frame, motor mounts, arms, arm mounts to the frame, frame spacers closely and any issues i have replaced since the first 2 crashes. Everything is secure and I have a railroad spike taped to the front to counter balance the battery since i don’t have my payloads on like the camera and GNSS PPK system. It seems pretty balanced both forward and back and left and right. I noticed my landing gear (not retractable) had a little slop so I fixed that last night.
At what point do I try disabling IMU’s to see if one is the issue. Although you mentioned that you looked at the IMU’s and they look good. Is there any further items I can turn on in the log to get more data about the vibrations?
I guess I could have a slightly bent motor that i am not aware of although i think i would have seen that when i was putting all the prop disks on the same plane. I had to replace the bearings in a motor after the first crash because it was noisy. After the new bearings it sounds good.
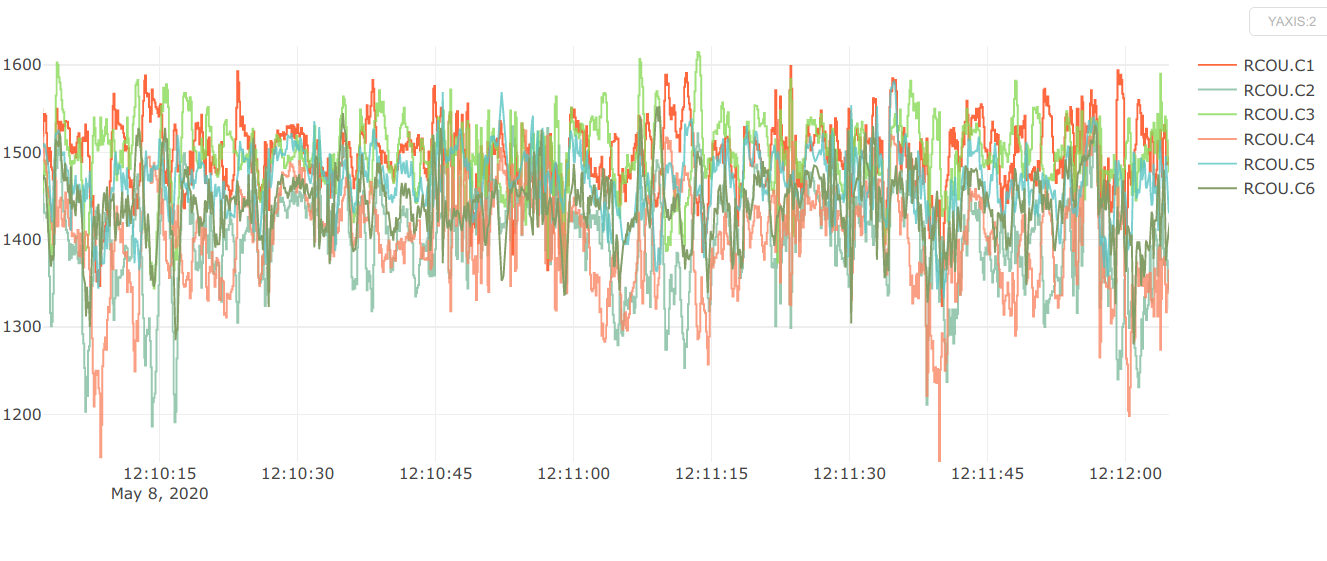
I just did a bench motor test without props. I ran each motor in sequence at 70% for 8 seconds and then ran all the motors together at 70% for 8 seconds. From my basic knowledge I am not seeing any motor balance issues. Here is the bin. Motor Test 70% no Props.bin (360.5 KB)
Should i be setting the Rate Roll and Pitch Filters to 10hz as suggested in the auto tune page as below?
Just did another test flight and it flew much better and i was able to get a longer flight time. Still not what i expect and not even comfortable doing an autotune yet but those last changes made a big difference. It seemed to wobble around some at times like it was a bit confused but it was slight. It was windy again today so i had to keep correcting it back toward me while in stabilize. Please let me know what you think from this last flight. The yaw seemed very sloppy but the pitch and roll reacted well to the RC controls. I was monitoring the vibrations during flight (just clicked VIBE in mission planner) and i didn’t see the Z values very high but i haven’t looked at the log much yet.
The new log from today (5/8/20) is this 2020-05-08 11-01-26. https://drive.google.com/drive/folders/1PmL7j8KsDodmy-BNF_3WwkxBLj6ywwwS?usp=sharing
Hi guys, I am wondering if anyone can review the most recent log? I am working on reading the logs myself but with this situation I am looking for someone that knows what to look for.
Thank you.
hi, neat thread. i got into the same issue - got a transplant done on my old 680 pro tarot - moved matek f765 into the plane build and instead mounted there kakute f7.
something is botched, as i get crazy vibrations now, even with using all proper mounts, etc. frustrating stuff.
with matek it was flying stable, i was testing the notch filter on it - it was pretty OK. all mechanics remained same - props, motors - but now model gets into the uncontrollable roll and seems to be ignoring stick input completely. here are logs - could you pls look at them, if you have a minute?
just to check if there is anything else in there other than vibrations that could explain zero ability to stabilize now - may i messed up motor outputs? i do not think so, as all seems to be working properly, but, outside review always helps. thx. 00000008.BIN (396 KB)
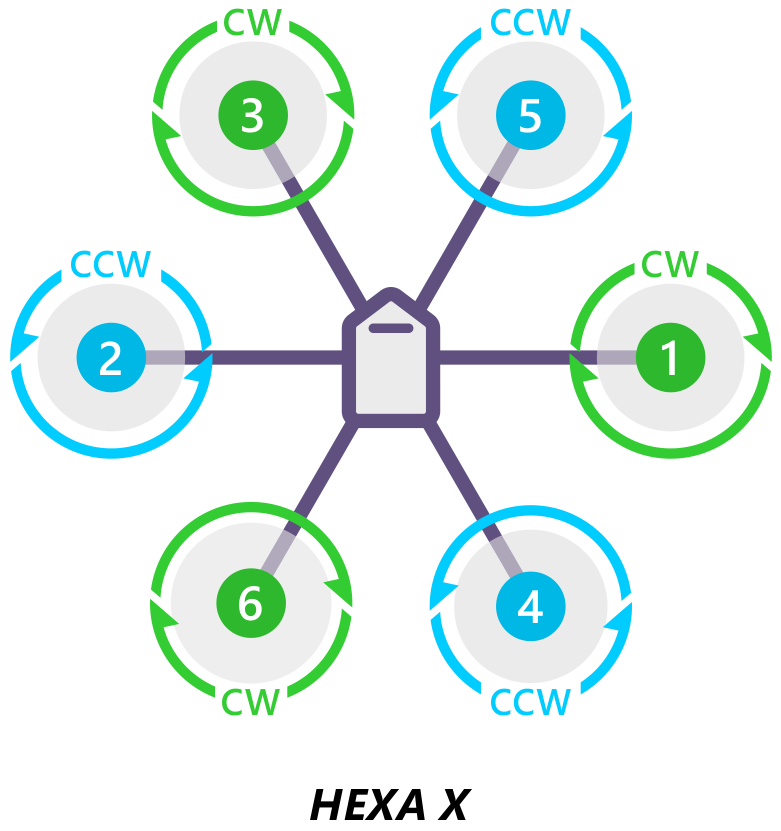
could somebody pls help me to maintain my sanity - on the picture below, the MP mapping of A,B…F motors - the ‘A’ motor should be the 5, right? and the B motor should be the 1 - clockwise movement around, is that right?
as i just did a test and my B is 3 and my C is 4 and how it happened is not clear to me at all. hwdef matches the master and all wires are soldered correctly.
i am beyond puzzled. rookiest mistake of them all - costed me a broken arm and damaged retractable gear servo.
wires are soldered correctly. i fixed it via hwdef change -
flipped outputs 3 and 1. only those out of 6 were wrong. does it mean an original hwdef for kakute has mislabeled outputs 1 and 3? go figure, dunno.
Drone flies fine now, and i activated filter back. what a botheration…
When the fimware’s for these types of boards 1st came out the outputs were not always ordered as per the board PCB mask. But at least with the Omnibus Nano that was fixed. Not sure about some of the others.
Hi Guys, i did 3 more flights today. A pre-autotune, then the autotune flight then a post autotune. I only tuned the Roll and Pitch as @smartdave recommended. The tune seemed to help the pitch but the roll over corrected after the tune. During the tune I heard a noise once in a while that sounded like a bearing possibly. These motors are brand new but have been in two crashes so anything could have happened. When i spin the back left motor (motor 6 on the hexa diagram) i can hear something very slight so i am going to change these bearings.
If someone can take a look at theses logs to see if things are starting to look better that would be greatly appreciated.
The .bin’s are in the “5-12-20 flight” folder. https://drive.google.com/drive/folders/1PmL7j8KsDodmy-BNF_3WwkxBLj6ywwwS?usp=sharing