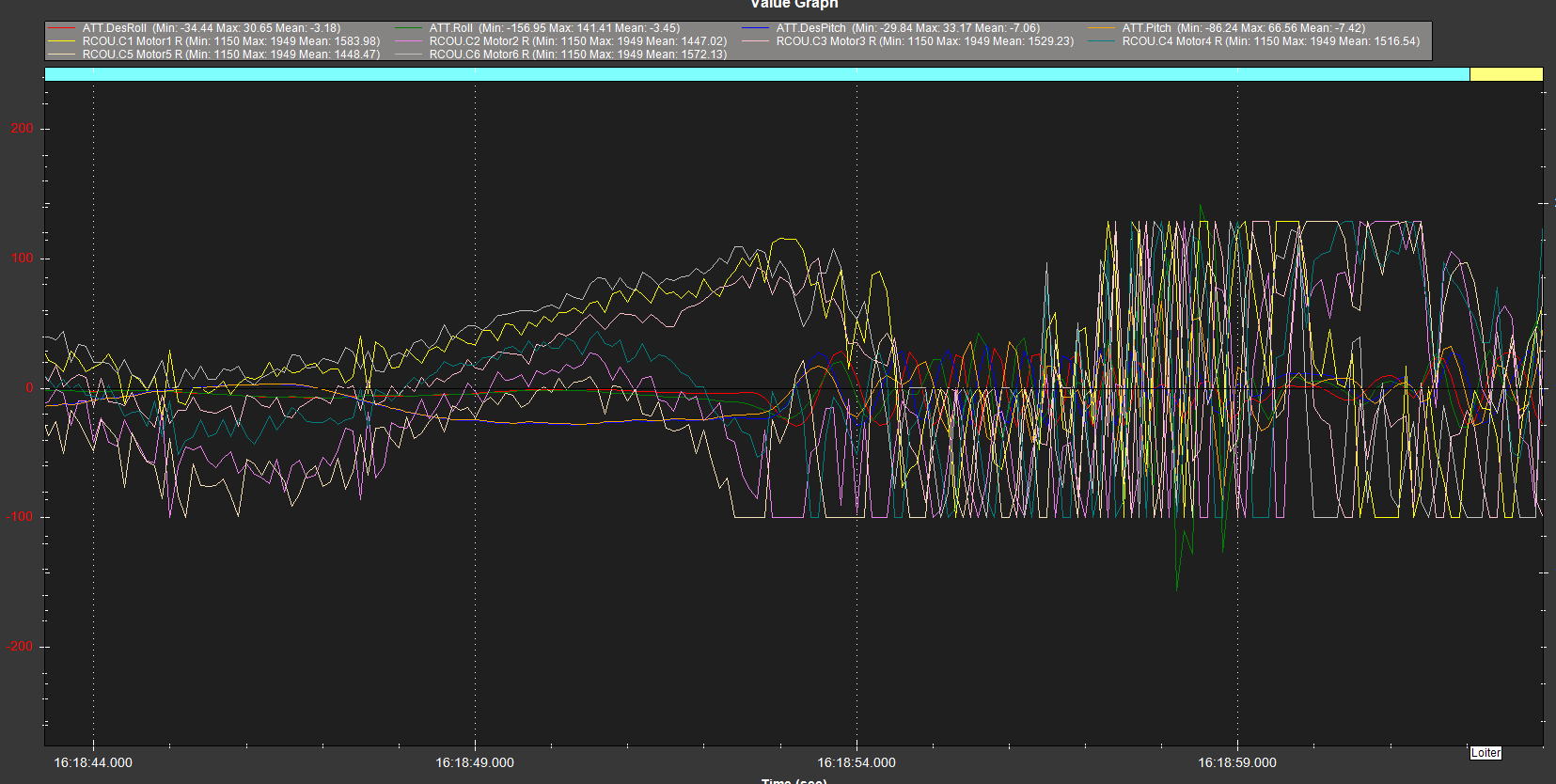
Hi, I decided to fly my Hexa in auto mode but at a faster horizontal speed. Few mins. later, it was on the way to waypoint 3 and it spun out of control( yaw and pitch), like violently! I tried to save it by switching modes but it seemed to make the issue worse, I wasn’t able to save it!
- Upon assessing the damaged copter, I noticed that the ESC soldering from PDB had been broken, I think it had happened when it crashed because the motor seems to have been working fine. I also noticed that the GPS was unplugged, could’ve been from the crash as well.
- On the other hand I did get a Potential thrust loss (5) error, and also a compass error, but by the time I saw them I was already trying to save the Hexa from crashing so, not sure if it was because of the violent spinning.
- all connections other than that are intact, and all motors are spinning without any interference
So, is it because I tried going too fast? or was there some other issue? any input would help, thank you!
the log: Filebin | b35oy6hqsfwcop7d