Hello Team, just got stuck with hexa balance problem for a year, even changed ESCs but with no success. Always the same 3CW vs 3CCW standing opposite each other. So what I did so far
Balanced the quad itself
Calibrated ESCs
Changed ESCs
While loitering, change the direction to eliminate wind leaning
no success,
I bet maybe someone have come through the same problem and share an advice,
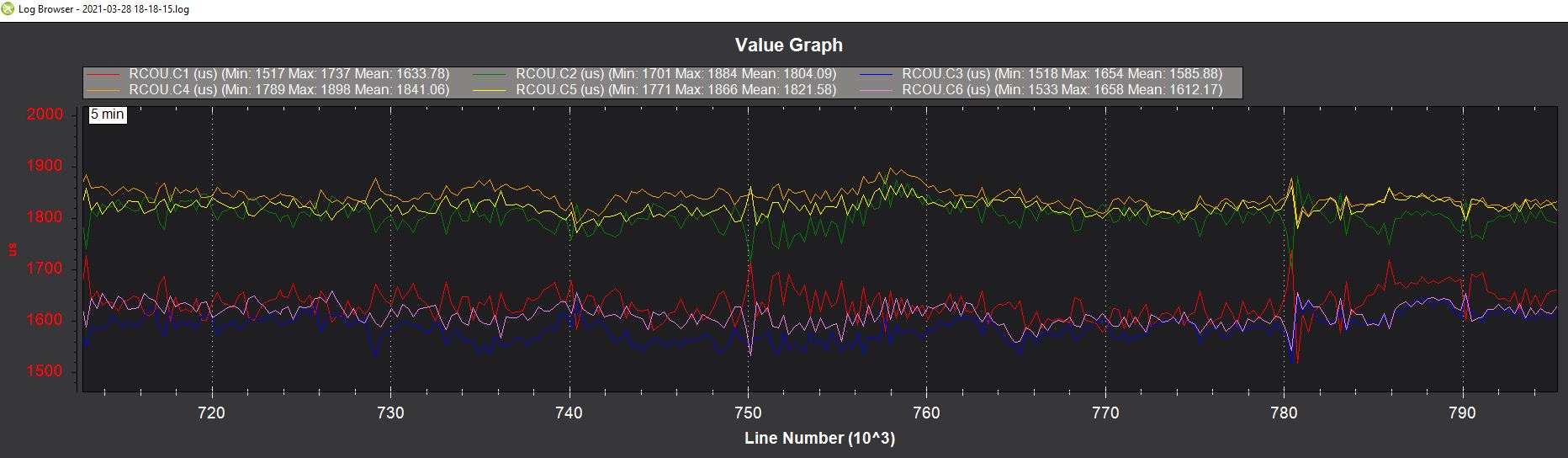
attached log
Does the frame have round arms? Twisted arms or motor mounts is the typical cause. Or some distortion. And you are asking for trouble with those 3 motors commanded almost to max. Very little headroom for stability. If you get Thrust Loss errors during aggressive maneuvering you will know why.
yep, round arms, and I did my best to make them level. And yes, Thrust Loss is what I’m getting all the time. The point is why 3 CW against 3 CCW as I always thought it should be only one failed motor and I can easily check it in log analyzer. Don’t know where to move now
It’s because the motors are not level and it’s fighting an induced yaw thrust. Multirotors yaw by spinning the CC/CCW motors faster or slower. It’s not a failed motor. When that happens the command goes to max on that output and the opposite arm is commanded low. Another classic case seen often.
One guy said he placed it upside down on a table with the motor mounts and/or arms mounts loose and then tightened them. Having some positive assy feature rather than just clamp force is a good idea. This was on a big X8 and it worked well.