I followed the steps of tuning and finished autotune, and it flew well in stabilize and AltHold mode. But when i switch to Loiter it got a little out of control, and i can’t figure out what the problem is.
I’m using Cube Black and Here+ Gps and got a good satelite count of 15 and a Hdop of 0.7. The motors seems to be OK.
Can someone please help me out!!
Set these params:
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
AUTOTUNE_AGGR,0.075
PSC_ACCZ_I,0.6
PSC_ACCZ_P,0.3
Y and Z vibrations are not bad but not great either, maybe something out of balance or loose?
The Vcc (5 volts) is a bit low, is that a genuine Cube power brick?
Barometer is a bit noisy, as if there’s too much prop-wash over the flight controller - or was the craft really bouncing up and down constantly by a half meter or so?
Sorry for the late reply.
I’m using T-motor 15*5 CF prop
Thank you for the suggestions on the params i’ll get them set for the next flight.
I’m thinking is the Y and Z vibration caused by the way i place my anti vibration mount?
About the Vcc(5 volts), how can i check them
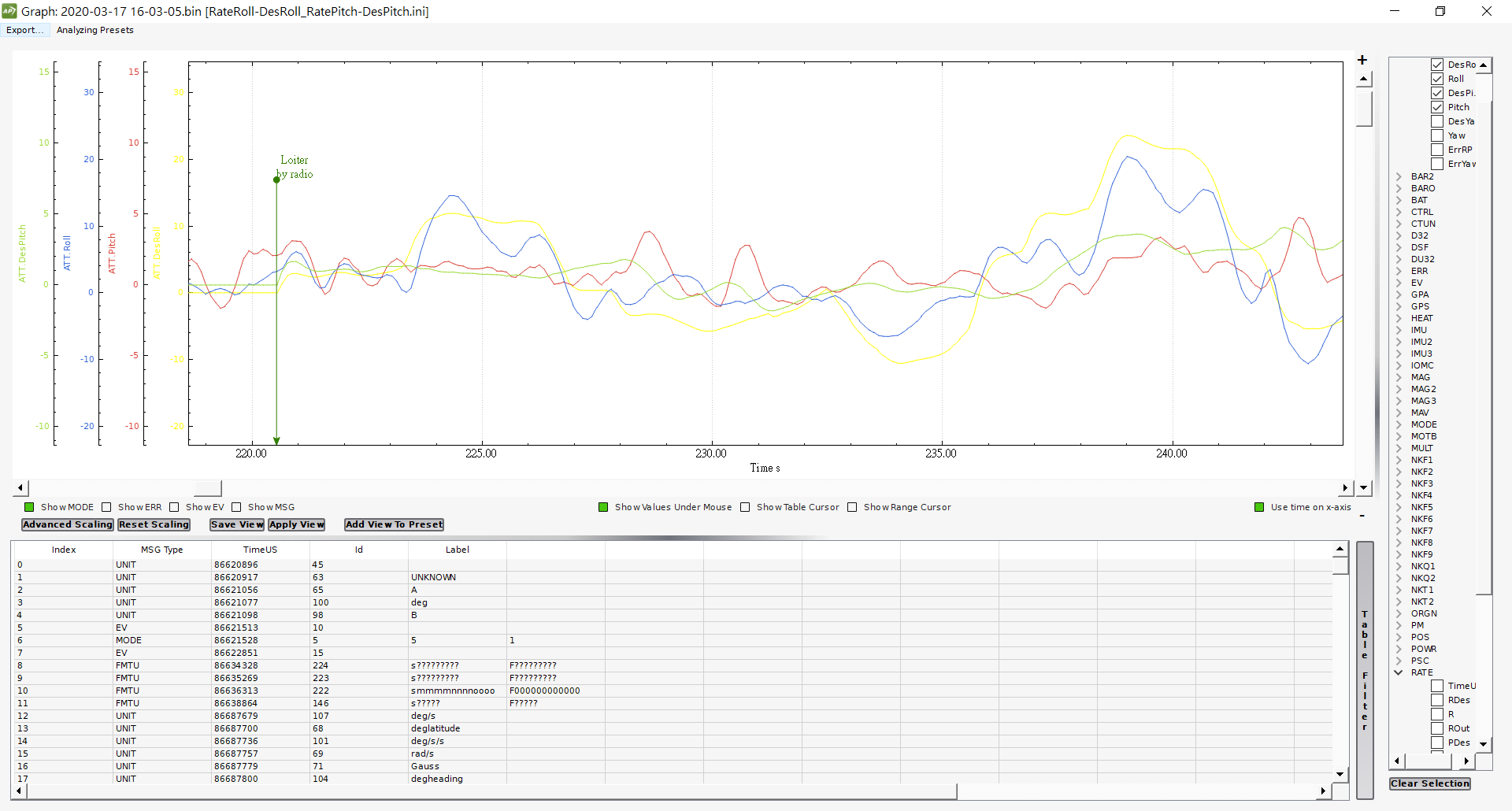
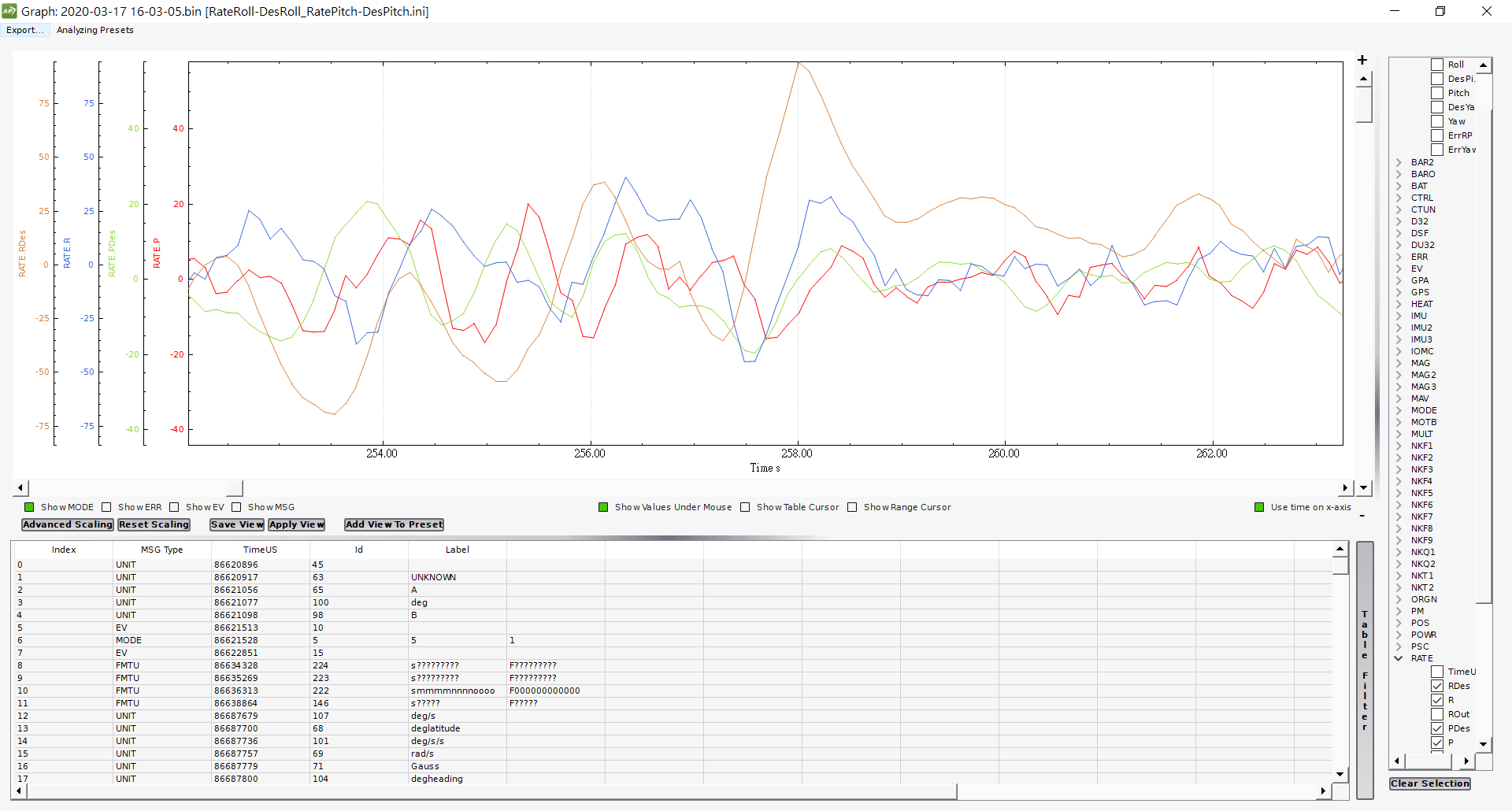
The height control works pretty well in AltHold mode but when i switch to Loiter move on the roll axis, the drone occurs to drop some altitude and that’s something i want to find out too. Maybe i’ll add a cap over the flight controller and try to fix this problem. And I’m thinking the major problem is the the overshoot in Loiter mode, is it the PID issue or something else and how can i fix that!
and here’s the picture of the frame
Generally Cubes can be hard mounted to the frame, it’s possible the strange Loiter behaviour is because that anti-vibration mount might be too soft.
Apart from the previous parameters I listed, set these too:
ACRO_YAW_P,2.50
ATC_ACCEL_P_MAX,75600
ATC_ACCEL_R_MAX,75600
ATC_ACCEL_Y_MAX,22500
ATC_RAT_PIT_FILTD,15.00
ATC_RAT_PIT_FILTE,0.00
ATC_RAT_PIT_FILTT,15.00
ATC_RAT_RLL_FILTD,15.00
ATC_RAT_RLL_FILTE,0.00
ATC_RAT_RLL_FILTT,15.00
ATC_RAT_YAW_FILTD,0.00
ATC_RAT_YAW_FILTE,2.00
ATC_RAT_YAW_FILTT,15.00
INS_GYRO_FILTER,30.00
MOT_THST_EXPO,0.71
Check that wiring is secured and not wobbling around, but not pulled tight against the flight controller. For example the wiring from the GPS should be secured down the GPS mast. Also try and check motor and prop balance if possible.
Run some more tests in Stabilize and AltHold, if there’s still vibrations or any instability try:
INS_ACCEL_FILTER,15
ATC_INPUT_TC,0.2 (up to 0.3 for softer RC control inputs)
Once you’re happy run a new series of Autotunes.
Then go back to the Tuning guide, set
ATC_THR_MIX_MAN,0.50
PSC_ACCZ_P,{1xMOT_THST_HOVER}
PSC_ACCZ_I,{2xMOT_THST_HOVER}
Thank you very much!! I’ll try these param for the next flight and see if it works.
I’m now working on a bigger frame and how should i set these params you listed. I set these params based on the tuning process instruction before.
Like this hexa for example, i set the params before i started autotune
ATC_ACCEL_P_MAX,75000
ATC_ACCEL_R_MAX,75000
ATC_ACCEL_Y_MAX,22500
but after autotune it turns into
ATC_ACCEL_P_MAX,22462.6
ATC_ACCEL_R_MAX,26790.3
ATC_ACCEL_Y_MAX,5847.8
So I’m wondering how you calculate these params, and how can i know if the params are safe for the copter to fly?
It’s my first time building large copter and i’m kind of nervous.
Thanks a lot!
Is it OK if there’s warning coming out when i change these
PSC_ACCZ_P,{1xMOT_THST_HOVER}
PSC_ACCZ_I,{2xMOT_THST_HOVER}
it’s out of range, should i just ignore the warning?